O Modo de autoprogramação (SPM) é um recurso que permite a um microcontrolador programar sua própria memória flash. Usando o SPM, um microcontrolador pode programar-se com um código SPM. O SPM é comumente usado com os códigos Boot-Loader do microcontrolador que ajudam a programar o microcontrolador serialmente. No microcontrolador AVR o SPM está disponível apenas para o código rodando no BLS da memória flash. Com a ajuda do SPM, um código no BLS pode reescrever a memória flash do aplicativo inteiramente ou parte dela. Pode até reescrever seu próprio código na seção BLS.
O SPM é um fator chave do código do Boot-Loader, pois a principal função do Boot-Loader é carregar um código de aplicativo na seção flash do aplicativo. O Boot-Loader pode receber o código binário de outros chips de memória, cartões SD ou através da porta serial do microcontrolador no caso de programação serial. É então com a ajuda do SPM que o microcontrolador escreve o código binário na seção flash da aplicação.
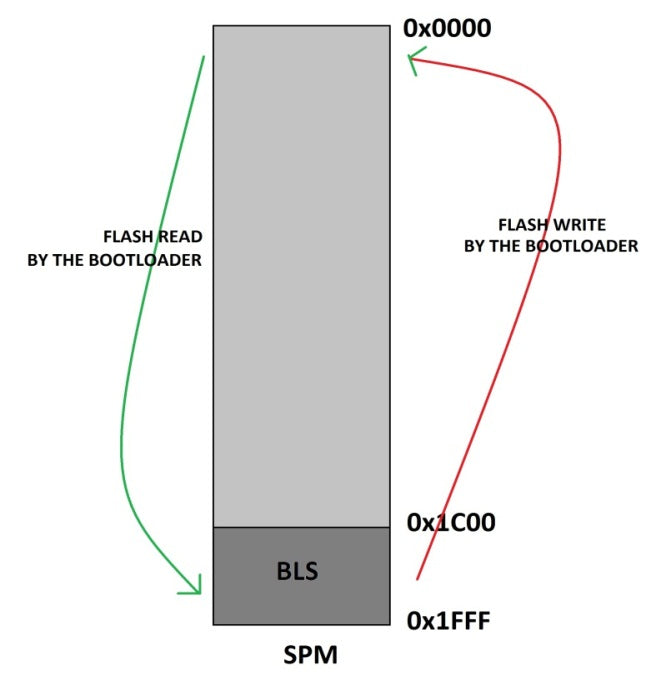
Modo de autoprogramação (SPM) é um recurso do microcontrolador AVR que permite ao microcontrolador programar sua própria memória flash. Somente o código em execução no BLS pode fazer uso deste recurso SPM. O microcontrolador pode ser feito para iniciar a execução a partir do BLS a partir daí o código pode acessar a área flash da aplicação. O BLS pode ler ou gravar o conteúdo de todo o flash, incluindo o próprio BLS.

Fig. 2: Diagrama de blocos do SPM com BLS no AVR
A tarefa de escrever o código BLS com SPM foi simplificada pelas APIs disponíveis no arquivo de cabeçalho
|
FUNÇÃO |
DESCRIÇÃO |
PARÂMETRO |
|
boot_is_spm_interrupt |
Verifique se a interrupção SPM está habilitada. |
|
|
boot_lock_bits_set (lock_bits) |
Defina os bits de bloqueio do Boot-Loader |
Uma máscara de quais bits de bloqueio do carregador de inicialização definir |
|
boot_lock_bits_set_safe (lock_bits) |
Aguarda a conclusão das operações EEPROM e SPM antes de definir os bits de bloqueio |
Uma máscara de quais bits de bloqueio do carregador de inicialização definir |
|
boot_lock_fuse_bits_get (endereço) |
Leia os bits de bloqueio ou fusível no endereço fornecido. Retorna 0 ou 1 conforme o bit do fusível estiver programado ou não |
O endereço a ser lido |
|
boot_page_erase (endereço) |
Apague a página flash referida pelo endereço |
Um endereço de byte em flash |
|
boot_page_erase_safe (endereço) |
espera que as operações EEPROM e SPM sejam concluídas antes de apagar a página |
Um endereço de byte em flash |
|
boot_page_fill (endereço, dados) |
Preencha o buffer de página temporário do Boot-Loader para endereço flash com palavra de dados |
O endereço é um endereço de byte. Os dados são uma palavra |
|
boot_page_fill_safe (endereço, dados) |
espera que as operações EEPROM e SPM sejam concluídas antes de preencher a página |
O endereço é um endereço de byte. Os dados são uma palavra |
|
boot_page_write (endereço) |
Grave o buffer de página temporário do Boot-Loader na página flash que contém o endereço |
Endereço de byte em flash |
|
boot_page_write_safe (endereço) |
espera que as operações EEPROM e SPM sejam concluídas antes de escrever a página |
Endereço de byte em flash |
|
boot_rww_busy |
Verifique se a seção RWW está ocupada |
|
|
boot_rww_enable |
Habilite a seção de memória Read-While-Write. |
|
|
boot_rww_enable_safe |
aguarda a conclusão das operações EEPROM e SPM antes de ativar a memória RWW |
|
|
boot_signature_byte_get (endereço) |
Retorna o byte da linha de assinatura no endereço fornecido |
O endereço do parâmetro pode ser de 0 a 0x1F |
|
boot_spm_busy |
Verifique se a instrução SPM está ocupada |
|
|
boot_spm_busy_wait |
Aguarde enquanto a instrução SPM está ocupada |
|
|
boot_spm_interrupt_disable |
Desative a interrupção do SPM |
|
|
boot_spm_interrupt_enable |
Habilite a interrupção do SPM |
|
Figura 3: APIs importantes no arquivo de cabeçalho do AVR para SPM
Usando as APIs acima, pode-se escrever um código para SPM em um microcontrolador AVR, desde que o código siga certas etapas na ordem. Neste projeto, o código que foi programado desde o início da memória flash é reprogramado em outra região da memória flash como tal. A tarefa de programar uma região da memória flash com o binário obtido da outra região pode ser realizada nas três etapas principais a seguir.
Passo: 1 Apague a página flash que está prestes a escrever
O primeiro passo é apagar a página flash que está prestes a ser escrita com os novos valores. A API que auxilia na execução desta etapa é;
Boot_page_erase (endereço)
Esta API pode apagar uma página inteira na flash que o parâmetro aborda. No código o endereço da página apagada é 256. A imagem a seguir mostra o status do buffer de página temporário e da memória flash na etapa 1. O buffer de página temporário é um buffer no qual uma página inteira pode ser armazenada antes de ser flashou em uma página na memória flash.

Fig. 4: A figura representa o status do buffer de página temporário e da memória flash no SPM do AVR
Etapa: 2 Armazene os valores em um buffer temporário antes de gravar em uma página flash
Esta é a segunda etapa na qual se deve armazenar o binário necessário em um buffer temporário, antes de gravar em qualquer página da memória flash. A API que pode ser usada para esse fim é;
boot_page_fill (endereço, dados)
Esta API fpreenche o buffer de página temporário do Boot-Loader byte por byte antes de atualizar os dados no buffer de página temporário em uma página como tal. Os dados do parâmetro representam cada byte no buffer e o endereço do parâmetro representa o endereço da página + deslocamento do local do buffer onde o byte de dados precisa ser armazenado.
A figura a seguir representa a operação na qual o buffer de página temporário é preenchido byte por byte usando a API boot_page_fill (endereço, dados).

Fig. 5: Operação de transferência de dados para buffer de página temporário usando a API boot_page_fill do AVR
Os dados de parâmetro na API boot_page_fill (endereço, dados) são na verdade lidos do primeiro local da própria memória flash com a ajuda de outra API que está disponível no arquivo de cabeçalho
pgm_read_byte (endereço)
|
FUNÇÃO |
DESCRIÇÃO |
PARÂMETRO |
|
pgm_read_byte (endereço) |
Esta função retorna o byte que lê da memória flash referida pelo parâmetro 'address' |
Refere-se à localização da memória flash da qual o byte precisa ser lido |
Etapa: 3 Programe o buffer temporário preenchido na página flash já apagada
Esta é a etapa final na qual o buffer temporário preenchido é atualizado usando uma API na página já apagada da memória flash. A API que auxilia nesta etapa é;
boot_page_write (endereço)

Fig. 6: Dados de buffer temporário transferidos na memória Flash do AVR usando API
O código neste projeto que foi escrito para o BLS pode copiar 300 bytes da memória flash para o buffer temporário começando no endereço 0x0000. Esses bytes são então transferidos para a página da memória flash começando no endereço 0x0100. Depois de fazer isso, o código do BLS saltará para o endereço 0x0100 para que o binário reescrito possa ser executado a seguir. Com este código do carregador de boot, qualquer programa que inserirmos no endereço começando em 0x0000 será reescrito em ox 0x0100 e executado. Um simples aplicativo de teste de LED piscando pode ser gravado na memória flash a partir de 0x0000 para testar o funcionamento. Atualize primeiro o código do BLS e depois o código da aplicação do LED usando as etapas explicadas no projeto anterior em LED piscando do BLS do AVR. Quando o led pisca, significa que o código foi reescrito de uma seção da memória flash para outra e está sendo executado a partir daí.

Fig. 7: LED piscando usando SPM do circuito AVR configurado na placa de ensaio
Código-fonte do projeto
###
#define F_CPU 8000000
###
Código-fonte do projeto
###
#define F_CPU 8000000
###
Diagramas de circuito
| Diagrama de circuito de como usar o SPM para programação de Flash para Flash |  |
Componentes do Projeto
- ATmega16
- LCD
- LIDERADO
- Resistor







Perguntas relacionadas a este artigo?
 Pergunte e discuta nos fóruns Electro-Tech-Online.com e EDAboard.com.
Pergunte e discuta nos fóruns Electro-Tech-Online.com e EDAboard.com.
Nos diga o que você acha!! Cancelar resposta
Você precisa estar logado para postar um comentário.