Um controlador eletrônico de velocidade (ESC) é um componente vital de um drone First Person View (FPV). O sistema de propulsão de um drone é construído a partir de três componentes principais:
- O controlador de voo
- O controlador eletrônico de velocidade (ESC)
- Os motores dos drones
O controlador de vôo recebe sinais do transmissor de rádio e envia sinais para o ESC. Assim, o ESC controla a velocidade de rotação do motor, manobrando o drone no céu. Como cada motor de um drone gira a uma velocidade ligeiramente diferente, cada um requer um ESC – que funciona de forma semelhante à caixa de velocidades de um veículo. Ele controla a velocidade de rotação com base em sinais temporizados.
Um drone usa motores DC com ou sem escova. Os motores DC escovados são mais baratos e frequentemente usados em brinquedos ou mini drones. Os drones comerciais e de consumo usam motores sem escovas, que são mais caros, mas também mais eficazes. ESCs de diferentes tipos são usados com ambos os motores.
 A mais nova geração de controladores eletrônicos de velocidade é avançada e oferece diversos recursos. Recomenda-se comprar uma combinação de controladores de voo e ESCs para evitar compatibilidade entre fornecedores. O combo FC-ESC é uma opção, e o ESC compatível e o controlador de vôo podem ser adquiridos separadamente. Todos os componentes do sistema de propulsão de um drone estão fortemente acoplados. Por isso é importante revisar as especificações dos EFCs antes de comprar um.
A mais nova geração de controladores eletrônicos de velocidade é avançada e oferece diversos recursos. Recomenda-se comprar uma combinação de controladores de voo e ESCs para evitar compatibilidade entre fornecedores. O combo FC-ESC é uma opção, e o ESC compatível e o controlador de vôo podem ser adquiridos separadamente. Todos os componentes do sistema de propulsão de um drone estão fortemente acoplados. Por isso é importante revisar as especificações dos EFCs antes de comprar um.
Neste artigo, discutiremos os principais fatores a serem considerados ao escolher um controlador eletrônico de velocidade para seu drone FPV faça você mesmo.
O que exatamente é um controlador eletrônico de velocidade?
Um controlador eletrônico de velocidade controla a velocidade dos motores de um drone com base nos sinais de aceleração do controlador de vôo. Um ESC conecta os motores ao controlador de vôo e à bateria. O controlador de vôo não pode controlar diretamente os motores do drone, então o ESC opera como hardware de interface entre os dois. Também é responsável por converter a energia CC da bateria LiPo em energia CA trifásica para os motores do drone.
O ESC faz interface com o motor por meio de três fios. A fiação determina o sentido de rotação do motor. A quantidade de corrente fornecida ao motor e a velocidade de rotação dependem do sinal de aceleração do controlador de vôo.
O circuito do ESC consiste em um microcontrolador, MOSFETs, gate drivers, um regulador de baixa queda e capacitores de filtragem. Também pode ter um sensor de corrente e LEDs na placa de circuito. Pode ter um circuito de eliminação de bateria (BEC), mas nem sempre.
Os tipos de ESC
Conforme mencionado, os drones são construídos com motores com ou sem escova. Entretanto, os controladores eletrônicos de velocidade para esses motores são diferentes. Os ESCs para motores escovados são comumente usados em veículos RC. Os ESCs para motores sem escova são leves, proporcionando alto desempenho e controle. Todos os drones comerciais usam motores sem escova.
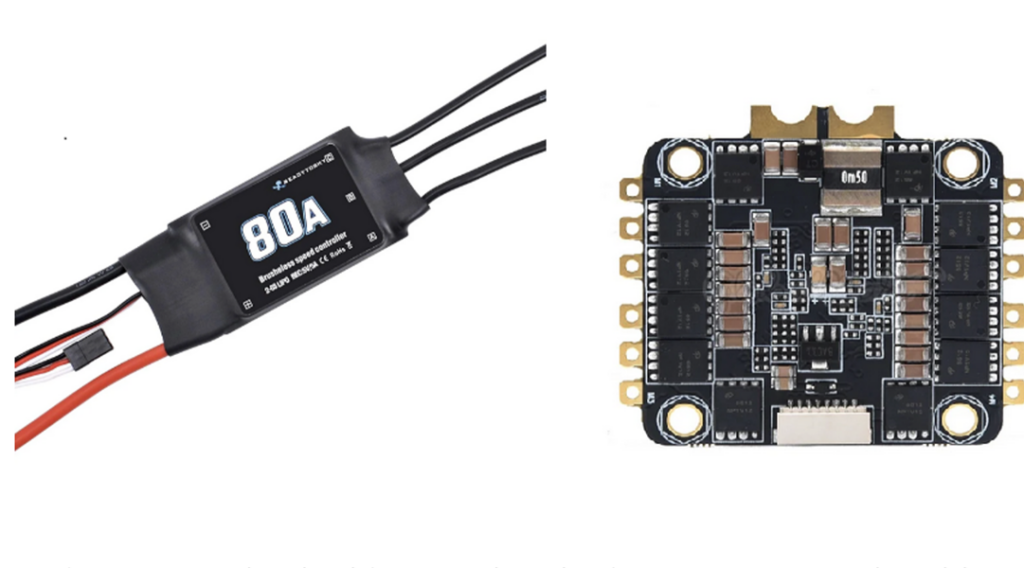
ESCs também estão disponíveis em duas configurações:
- ESCs únicos – módulos autônomos que controlam um único motor drone
- CES 4 em 1 – compreende quatro ESCs únicos integrados em um único conselho
ESCs individuais são placas de circuito ESC de baixo custo que podem ser montadas nos braços de um drone, oferecendo melhor fluxo de ar e resfriamento natural. Eles são fáceis de instalar e substituir se estiverem danificados.
A bateria LiPo alimenta o ESC por meio de uma placa de distribuição de energia (PDB) ou controlador de vôo All-in-One (AiO), que possui um PDB embutido. Cada ESC se conecta ao controlador de vôo por meio de um chicote de fios diferente, e essa fiação (com solda) adiciona peso ao drone. Essa fiação na estrutura do drone é a principal desvantagem dos ESCs únicos.
Além disso, ao instalar ESCs individuais, a massa central do drone deve ser ajustada adequadamente.
Os ESCs 4 em 1 são projetados para uso em quadricópteros. Esses módulos vêm no mesmo tamanho do controlador de vôo e são baseados no padrão de montagem das estruturas padrão dos drones. Por exemplo, os tamanhos de ESCs 4 em 1 incluem 16x16mm, 20x20mm, 30x30mm, etc.
Um ESC 4 em 1 é montado logo abaixo do controlador de vôo, conectado por meio de um único chicote. O uso de um ESC 4 em 1 é conveniente e minimiza a soldagem e a fiação. Além disso, por estar montado no centro do drone, logo abaixo do controlador de vôo, não é necessário ajustar o centro de massa do drone.
No entanto, estes CES carecem de modularidade. A placa inteira deve ser substituída se um único ESC for danificado em um ESC 4 em 1, embora geralmente sejam confiáveis. Os ESCs maiores são os mais duráveis, pois possuem MOSFETs maiores integrados.
Se você estiver construindo um quadricóptero, um ESC 4 em 1 é a opção mais conveniente. ESCs únicos são mais acessíveis e oferecem modularidade e baixo risco. Se você estiver construindo um drone diferente, como um drone de três rotores, hexacóptero, octocóptero ou outro design, ESCs únicos são a única opção.
Por que usar ESC?
Um controlador de vôo não pode controlar diretamente os motores do drone, independentemente de serem com ou sem escovas. Um dos motivos é que o controlador de vôo é uma placa microcontroladora que opera em baixa tensão e corrente, enquanto os motores do drone operam em alta corrente. Em segundo lugar, os motores do drone são inerentemente instáveis. A velocidade dos motores simplesmente não pode ser controlada sem um circuito dedicado como um ESC.
A aerodinâmica de um multicóptero é mais complexa em comparação com a de um helicóptero. Em um helicóptero, apenas um rotor gera empuxo para o vôo, e há um rotor de cauda para contrabalançar o torque gerado pelo rotor principal. Num multicóptero, cada motor gera seu próprio empuxo, que deve ser controlado para garantir um vôo estável.
O controlador de vôo possui um sensor giroscópio embutido que monitora a orientação e direção do drone. O controlador de vôo gera sinais temporizados para todos os rotores de acordo com o feedback do sensor giroscópio. Isso garante que o multicóptero mantenha uma orientação estável durante o vôo.
Como funciona um ESC em drones FPV
Um ESC para motores com e sem escova baseia-se no mesmo princípio. O ESC obtém energia da bateria LiPo e recebe um sinal de controle do controlador de vôo. O sinal de controle é uma onda modulada por largura de pulso (PWM). A quantidade de corrente fornecida ao motor é proporcional à largura do sinal PWM.
Assim, o motor gira a uma velocidade maior quando o controlador de vôo envia um sinal de controle de maior largura para o ESC, e vice-versa. O sinal de controle do controlador de voo é determinado com base no feedback dos sensores de orientação e direção do controlador de voo e na entrada do piloto do transmissor remoto.
A velocidade variável dos rotores é controlada para que o drone voe na direção e altitude instruídas, mantendo sua orientação e estabilidade aérea.
Especificações principais de um ESC
Os componentes que compõem o sistema de propulsão de um drone são fortemente acoplados e críticos. Os motores, controlador de vôo, ESC e bateria LiPo devem ser compatíveis. Suponhamos que você já tenha comprado os motores, uma bateria compatível e um controlador de vôo para o seu drone DIY. Agora é hora de escolher os ESCs. Considere estas especificações primeiro.
Classificação atual: esta é a quantidade de corrente que o ESC pode suportar com segurança e a primeira coisa a ter em conta ao selecionar um controlador eletrônico de velocidade – e pode ser difícil de determinar. A classificação de corrente desejada depende do motor do drone e da hélice. O motor tem uma corrente nominal. A maioria dos motores BLDC tem uma corrente de pico na partida três vezes ou mais que a corrente nominal. Quanto maior o tamanho do motor e sua classificação KV, maior será a corrente. Hélices maiores ou mais pesadas também aumentam a corrente consumida pelos motores. Quando um motor gira, se a corrente consumida por ele for maior do que a que o ESC pode suportar, o ESC superaquecerá e eventualmente queimará.
Os ESCs têm duas classificações de corrente, contínua e intermitente. A classificação de corrente indicada no adesivo ESC é a classificação de corrente contínua. É a corrente contínua máxima que um ESC normalmente pode suportar. A classificação da corrente de ruptura é a corrente máxima que um ESC pode tolerar por alguns segundos. Se a corrente consumida pelo motor exceder a classificação da corrente de ruptura e persistir por mais tempo (> 10 segundos), o ESC irá queimar. A classificação da corrente de ruptura é sempre superior à classificação da corrente contínua.
As classificações de corrente contínua típicas de um ESC são 6A, 10A, 20A, 30A e 35A. Os ESC 6A e 10A são adequados para brinquedos e mini drones com hélices menores e mais leves. Geralmente, esses drones são alimentados por baterias LiPo de duas ou três células. Os ESCs 30A ou 35A são adequados para drones maiores com hélices de cinco polegadas ou alimentados por baterias LiPo de cinco ou seis células.
Os ESCs 30A e 35A têm peso semelhante, mas o ESC 35A oferece melhor confiabilidade e durabilidade. Como regra geral, a amperagem dos ESCs deve ser pelo menos 10~15% maior que a corrente máxima do motor do drone em aceleração total. Se a classificação do motor for 20A em aceleração total, a classificação de corrente contínua do ESC deve ser de pelo menos 25A.
Muitos ESCs possuem um sensor de temperatura integrado para evitar superaquecimento e evitar que o drone voe próximo a objetos com alta condutividade térmica.
Os motores drone raramente, ou nunca, consomem a corrente nominal máxima. A corrente máxima normalmente consumida permanece sempre 20~30% menor que a corrente nominal máxima. Se a corrente máxima consumida em aceleração total por um motor for 20A em condições de solo, ele normalmente consumirá uma corrente máxima de 15~16A durante o vôo.
Existem duas razões para isso. Durante um voo, os motores dos drones raramente operam a todo vapor. A velocidade de rotação varia em segundos para manter a orientação e seguir a direção instruída. Em segundo lugar, os motores e o ESC experimentam um efeito de resfriamento devido ao fluxo de ar durante o vôo.
É importante que a classificação atual do ESC não seja desnecessariamente superior aos requisitos do drone. Se um drone precisar apenas de 20A ESC, adicionar um ESC de 35A não prejudicará a operação, mas adicionará peso e tamanho extras ao drone.
Classificação de tensão de entrada: a classificação de tensão máxima de um ESC também é importante. Embora alguns ESCs sejam classificados para baterias LiPo 3S-4S, outros podem suportar baterias LiPo 6S. Se a tensão da bateria for superior à tensão máxima do ESC, tanto o ESC quanto o motor podem ser danificados. Se um motor for alimentado por uma bateria de alta tensão, a corrente consumida para fornecer a mesma potência é reduzida.
Portanto, se um ESC de alta tensão for selecionado, a potência geral será aumentada. Um drone de alta tensão pode voar mais rápido que um drone de baixa tensão. Os picos de tensão da bateria são sempre superiores à tensão nominal. É por isso que muitos fabricantes preferem o 6S ESC devido à maior tolerância de tensão.
Peso e tamanho: normalmente, quanto maior a classificação atual do ESC, mais pesado é o drone – e vice-versa. Quanto mais leve o drone, melhor… mas há compensações. Os ESCs de corrente mais baixa são mais leves, mas geralmente oferecem menor desempenho e menor dissipação de calor (o que pode levar ao superaquecimento).
Um ESC de alta corrente oferece melhor desempenho e resfriamento, mas será maior em tamanho e peso. Normalmente, ESCs individuais pesam cerca de 4 a 6 gramas, e um ESC 4 em 1 pesa cerca de 12 a 15 gramas. Se a estrutura de um drone tiver braços finos ou curtos, o tamanho de um único ESC não deve exceder 1~2mm das dimensões do braço. Para quadricópteros, um ESC 4 em 1 é a opção ideal, disponível nas classificações de 6A a 35A e cabe facilmente sob o controlador de vôo, independentemente do tamanho.
Firmware ESC: o firmware determina o desempenho de um ESC. Ele também fornece informações sobre os protocolos ESC suportados e interfaces de configuração.
Alguns firmware ESC populares incluem BLHeli_S ESC, BLHeli ESC, BLHeli_32, KISS e SimonK ESC.
- SimonK é um firmware ESC de código aberto mais antigo que agora está desatualizado. Então, é melhor evitá-lo.
- BLHeli e BLHeli_S são firmware ESC de código aberto. BLHeli está desatualizado, mas ainda é usado por alguns ESCs. BLHeli_S é um BLHeli de segunda geração da BusyBee Processors. Ele vem com hardware PWM para controle suave do motor e suporta sinais de entrada de 1-2ms com Oneshot125, Oneshot42 e Multishot.
- BLHeli_32 é um BLHeli de terceira geração com código-fonte fechado, exigindo taxa de licença. Isso é baseado em um microcontrolador de 32 bits que fornece maior capacidade de processamento, menor latência e maiores taxas de atualização para sinais de entrada.
- KISS é um firmware ESC de código fechado que roda apenas em ESCs KISS.
Protocolos ESC: eles são semelhantes ao sistema operacional de um computador. Os protocolos determinam como um ESC e um controlador de vôo se comunicam. Eles também afetam o desempenho e a estabilidade do drone.
Os protocolos ESC mais populares incluem Standard PWM, Oneshot125, Oneshot42, Multishot, Dshot e Proshot. Proshot é o protocolo ESC mais recente, enquanto o PWM padrão é o mais antigo. O protocolo ESC determina o idioma e as regras nas quais o ESC e o controlador de voo se comunicarão. Também determina a velocidade e frequência da comunicação entre os dois.
O PWM padrão leva 1000 ~ 2000 nós para comunicar um pacote de dados, Oneshot125 leva 125 ~ 250 nós, Oneshot42 leva 42 ~ 84 nós, Multishot leva 5 ~ 25 nós e Dshot leva 13,4 ~ 106,8 nós. Multishot é de longe o protocolo ESC mais rápido.
Processador ESC: existem três famílias principais de processadores (microcontroladores) que são usados em multiplexadores ESC: controladores ATMEL de 8 bits, SILAB de 8 bits e ARM Cortex de 32 bits. Os primeiros controladores de 8 bits da ATMEL eram comumente usados e compatíveis com SimonK e BEHeli. Eventualmente, eles foram superados pelos controladores de 8 bits da SILAB, que são compatíveis apenas com BELHeli e BLHeli_S. Mais recentemente, o controlador ARM Cortex de 32 bits é normalmente usado e suporta BHeli_32.
ESC único ou 4 em 1: Um ESC único ou 4 em 1 pode ser usado na construção de quadricópteros. Mas é mais limpo e conveniente usar o ESC 4 em 1.
O 4 em 1 oferece fiação limpa, peso centralizado e fácil instalação, e geralmente vem com reguladores de tensão integrados que podem ser usados para distribuição de energia. No entanto, se um dos ESCs do 4 em 1 estiver danificado, toda a placa deverá ser substituída. Os ESCs individuais mantêm o design modular e são mais acessíveis. Ao montar ESCs individuais, espere mais fiação e ajuste o centro de massa. Para drones que não sejam quadricópteros, ESCs únicos são mais adequados.
Com ou sem BEC: BEC significa circuito de eliminação de bateria. Um ESC com BEC pode alimentar outros componentes do drone, como o receptor RF, servos, controlador de vôo e outros componentes de 5V. Isso elimina a necessidade de baterias extras no drone e reduz o peso. Hoje em dia, a maioria dos controladores de vôo vem com um módulo de energia separado, suficiente para alimentar o receptor de RF, o leme e o controlador de vôo. Nesses casos, não é necessário um BEC no ESC.
Existem dois tipos de BEC em ESCs, lineares e comutados. Um BEC linear é mais barato, mas tem apenas 25% de eficiência energética. BECs comutados são mais caros, mas fornecem 85% de eficiência energética. Portanto, vale a pena verificar se o BEC incluído em um ESC é linear ou comutado. Também é importante verificar a classificação atual do BEC. Deve ser superior ao consumo total de corrente de todos os receptores e servos. Para drones menores, 1,5~2A BEC é suficiente. Para drones de tamanho médio, o 3A BEC é adequado. Os drones grandes precisam de um BEC 5A.
Limitações da bateria: se uma bateria menor como 3S-4S for selecionada para um drone, ela poderá descarregar precocemente devido à resistência interna. A tensão pode cair até o limite de descarga à medida que mais corrente é retirada da bateria. A bateria também pode descarregar antes de atingir a corrente máxima do ESC. Portanto, o tamanho da bateria LiPo pode limitar o tempo de voo e a altitude máxima que o drone pode voar. Para um maior tempo de vôo, uma bateria grande (como a 6S) é preferida – e um ESC com uma corrente nominal mais alta deve então ser selecionado.
Capacidade de resposta: hoje, muitos ESCs possuem suporte de frenagem ativa que melhora a capacidade de resposta do drone. Um ESC com transistores ou gate drivers dedicados (a escolha ideal) normalmente tem melhor capacidade de resposta. Também deve incluir hardware PWM.
Impulso ESC: o impulso produzido por um ESC de qualidade é geralmente 20 a 30% maior do que um menos caro ou eficaz. O impulso produzido nos motores depende principalmente do ESC. Os outros fatores que podem afetar a produção de empuxo nos motores incluem:
- A qualidade das juntas de solda
- A eficiência do dissipador de calor do ESC
- A qualidade do drone
Recomenda-se comprar ESC de fabricantes de renome, em vez de procurar alternativas mais baratas.
Capacitores: uma das últimas coisas a serem verificadas são os capacitores de baixo ESR no quadro de distribuição de energia do ESC. Esses capacitores desempenham um papel essencial na proteção dos componentes do drone contra picos de tensão. Os capacitores também auxiliam no cancelamento do ruído eletrônico nos sinais de vídeo FPV.
Como escolher um ESC?
Primeiro, determine as configurações do motor e da bateria LiPo para o seu drone. Em seguida, decida se um ESC único ou 4 em 1 é o ideal. Ambos os tipos de ESCs têm vantagens e desvantagens diferentes. Em seguida, você pode selecionar ESCs de fabricantes de renome com base nas classificações de corrente e tensão. Isso determinará automaticamente o tamanho e o peso do seu ESC, que você deve garantir que seja compatível com o design do seu drone.
Finalmente, você pode selecionar um ESC com base no processador, firmware e protocolos suportados. Estes factores são cruciais na determinação dos custos do ESC. Se o controlador de vôo tiver um módulo de alimentação separado, você deve procurar um ESC com BEC. Um ESC com BEC comutado será mais caro, mas mais eficiente em termos de energia. A escolha de um processador integrado, firmware, protocolo ESC e BEC dependerá do desempenho, qualidade e longevidade esperados do drone, bem como do seu orçamento.