Nos últimos anos o interesse em Veículos aéreos não tripulados (UAVs) e seu uso para uma gama cada vez maior de aplicações cresceu tremendamente. Este tipo de aeronave pode ser controlada remotamente ou programada para voar de forma autônoma. Eles têm sido usados para diferentes tipos de aplicações como entidades individuais, tanto em tarefas militares como civis. A investigação relacionada com este tipo de sistemas está a ser realizada em muitas áreas, desde a concepção de aeronaves mais eficientes destinadas a aplicações específicas, ao desenvolvimento de electrónica de controlo melhorada que proporcione melhores comportamentos autónomos, a estratégias optimizadas de planeamento de trajectos, ou à abertura de novos domínios de aplicação. Atualmente, todo um novo campo de pesquisa está se abrindo na área de coordenação de equipes de UAV para realizar cooperativamente diferentes missões. Este campo ainda está em sua infância e muitas abordagens novas e interessantes estão sendo exploradas para diferentes aplicações. Exemplos destes são trabalhos relacionados ao planejamento de trajetória em equipes de UAV, rastreamento de alvos em tempo real e muitos outros.
O tamanho cada vez menor e as capacidades crescentes dos dispositivos microeletrônicos nos últimos anos abriram as portas para pilotos automáticos mais capazes e impulsionaram mais aplicações de Veículos Aéreos Não Tripulados (UAV) em tempo real. Payload Directed Flight (PDF), uma tarefa de pesquisa da Diretoria de Missão de Pesquisa Aeronáutica da NASA, Programa Aeronáutico Fundamental, Projeto Subsônico de Asa Fixa, visa resolver isso desenvolvendo um conjunto de capacidades tanto em hardware quanto em software que permite tais aplicações em tempo real. Especificamente, a pesquisa em voo direcionado de carga útil examina modos, arquiteturas e algoritmos de piloto automático centrados em sensores e carga útil que fornecem camadas de orientação inteligente, navegação e controle para veículos de voo para atingir os objetivos da missão relacionados aos sensores de carga útil, levando em consideração várias restrições, como as limitações de desempenho da aeronave, rastreamento e estimativa de alvos, prevenção de obstáculos e satisfação de restrições. O problema central abordado pelo PDF é o controle de uma planta conhecida e controlável interagindo com um sistema externo baseado na carga útil e no feedback dos dados do sensor que fornece observação parcial e compreensão do sistema externo, para satisfazer os objetivos da missão e as restrições do sistema combinado.
Com o sucesso progressivo no campo de batalha nas Operações Tempestade no Deserto, Força Aliada, Liberdade Duradoura e Liberdade do Iraque, os Veículos Aéreos Não Tripulados (UAVs) estão capturando a imaginação dos militares em todo o mundo. O espectro dos UAV iraquianos com uma capacidade de alcance de mais de 300 milhas transportando armas químicas/biológicas foi descrito pelo Secretário de Estado dos EUA, Colin Powell, nas suas observações de Fevereiro de 2003 ao Conselho de Segurança da ONU.
PESQUISA DE LITERATURA
Pequenos veículos aéreos não tripulados (UAVs) podem ser implantados nas linhas de frente do combate para fornecer consciência situacional a pequenas unidades de tropas por meio de informações em tempo real sobre as áreas circundantes.1 Pequenos veículos aéreos não tripulados e microveículos de asa fixa (como o Dragon Eye , Aerosonde, Hornet e Wasp) tornaram-se predominantes e demonstraram impressionantes capacidades de voo e níveis de autonomia.2 Estes UAVs podem pesar apenas alguns gramas. No entanto, mesmo os modelos mais leves devem voar bastante rápido para fornecer sustentação suficiente para o vôo. Estas aeronaves de asa fixa também necessitam de espaço para virar e embora a investigação tenha estudado a sua capacidade de voar em pequenos círculos sobre uma área específica, são difíceis de voar em locais confinados, tais como ambientes urbanos e pequenos espaços interiores.
Os veículos aéreos não tripulados de asas rotativas têm potencial para serem muito úteis se puderem pairar e voar verticalmente.
Atualmente, os UAVs VTOL, como o Fire Scout e o Hummingbird, têm a capacidade de voar de forma autônoma, pousar em um local específico e decolar novamente. UAVs menores com essas capacidades teriam muitas aplicações, incluindo voar através de edifícios para busca e salvamento ou operações de vigilância.
No entanto, os desafios técnicos para pequenos sistemas de UAV de asa rotativa são numerosos. Altas relações empuxo-peso são necessárias para o sistema de propulsão. Uma resistência longa o suficiente para realizar uma missão significativa também será importante. Uma combinação cuidadosa de baterias, motores elétricos e rotores será essencial; e estes terão que ser dimensionados para transportar a carga útil necessária. Incorporar um sistema de controle semi-autônomo confiável nestes veículos pequenos, para que o operador não tenha que monitorar constantemente seu desempenho ou localização, será um grande desafio, uma vez que eles só serão capazes de transportar os menores sistemas de microprocessadores e fontes de alimentação junto com muito sistemas de sensores leves e baratos. Além disso, um Sistema de Posicionamento Global (GPS) não funcionará em ambientes fechados, portanto outros sensores terão que ser usados para voos em ambientes fechados. O software deverá ser muito compacto para caber na memória disponível, mas poderoso o suficiente para fornecer controle inteligente com dados de sensores de qualidade limitada.
DETALHES TEÓRICOS E ANÁLISE DO TEMA
O Projeto consiste em 3 seções.
}· Seção de Aeromodelismo
· Seção Eletrônica
· Seção de Comunicação
Seção de Aeromodelismo:
Esta seção consiste na parte de design, ou seja, a estrutura geral do Drone, o
projeto do mecanismo de vetorização de empuxo, escolha de hélices para atingir a relação impulso-peso necessária, projeto de ligação servo, montagem do motor, posicionamento de componentes, etc.
Seção Eletrônica:
Esta seção inclui o projeto da fonte de alimentação e do mecanismo de distribuição. Também consideramos vários fatores como consumo de energia, empuxo máximo e RPM antes de selecionar motores BLDC como motor de propulsão principal. O Cérebro do UAV é o seu sistema controlador de vôo que consiste no processador Atmel 324 (kk2) ou atmel 328 (HK), sensores giroscópio e acelerômetro que formam a Unidade de Medição Inercial.
Usamos e comparamos dois tipos de placas IMU, viz.
1. Placa de controle do quadricóptero Hobbyking v3.
2. Placa de controle multirotor KK2.0.
Seção de Comunicação:
Para controlar o UAV remotamente, estamos usando um par transmissor-receptor de 6 canais que usa espectro de banda ISM (2,4 GHz) para comunicação.
O transmissor transmite os sinais PPM usando Frequency Hop Spread Spectrum que são decodificados pelo receptor para formar sinais PWM de tempo variando de 1ms a 2ms e frequência de 50Hz.
Para obter transmissão de áudio/vídeo em tempo real, podemos usar transmissor-receptor compatível com DVR e câmera CCD PAL de 1/3”. Existem várias versões disponíveis com frequência de transmissão como 900 MHz, 2,4 GHz, 5,8 GHz, portanto, se você estiver usando um transmissor de 2,4 GHz, não use um transmissor de vídeo da mesma frequência, pois isso causará interferência e causará um travamento.
Neste projeto utilizamos uma pequena câmera tipo chaveiro que grava vídeo em um cartão SD (sem RTVT).
Nota: Este projeto está relacionado ao hobby RC, que é um hobby emergente na Índia e não há muitos Hobbyistas na Índia no momento.
Então se você quiser saber sobre esse hobby o básico de avião Rc, carro Rc, etc passe por estes links.
Seção de Comunicação
Na seção de comunicação e eletrônica estaremos utilizando praticamente produtos disponíveis no mercado e não faremos nada exceto na seção de aeromodelismo.
Agora, para o controle sem fio do nosso UAV, precisaremos de um transmissor e um receptor.
Agora esta seção pode ser muito grande se eu tentar fazer uma comparação de todos os Txr-Rxr disponíveis no mercado, ou tentar fazer um, mas não é viável, então usaremos um par Txr-Rxr disponível no mercado.
Esses pares Txr-Rxr não são um simples transmissor infravermelho ou algum tipo de decodificador e codificador que você pode ter usado em algum projeto de robótica. Esses pares são feitos especialmente para uso em hobby RC para controlar aviões, helicópteros, carros, etc.
Também sou iniciante nesta área e ainda não pilotei um avião RC com sucesso.
Este par Txr-Rxr usa banda gratuita não licenciada para comunicação.
Anteriormente era usada a frequência de 75 MHz, mas agora todos mudaram para sistemas de 2,4 GHz, uma vez que é a banda de frequência gratuita e não licenciada atribuída pelo governo.
O par Txr-Rxr de 2,4 GHz usa técnica de espalhamento de espectro que os torna resistentes a interferências e proporciona uma operação sem falhas. Alguns usam tecnologia FHSS, alguns usam tecnologia DSSS e alguns usam FASST híbrido (FHSS+DSSS).
Agora o ponto mais importante, a faixa de preço do rádio varia de Rs. 2.000 – 20.000 dependendo das funcionalidades oferecidas pelo rádio. Rádios caros e de última geração fornecem programação e salvamento de configurações diferentes para modelos diferentes, sem a necessidade de conexão a um computador. Eles também fornecem algum tipo de telemetria onde a quantidade de bateria restante em seu avião é exibida na tela do Txr.
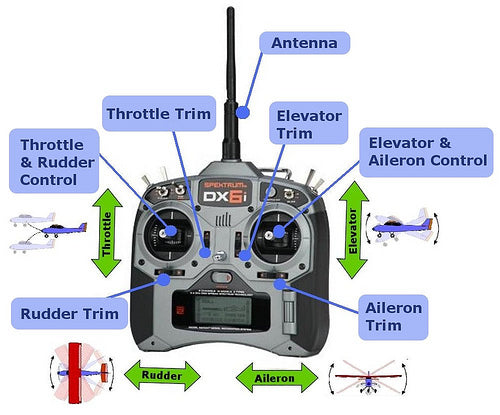
Noções básicas do transmissor
Noções básicas do transmissor:

Termos básicos sobre rádio:
Vareta do acelerador: A vareta do acelerador mudará a velocidade do motor.
Aileron: O stick do aileron induzirá o rolamento na aeronave.


Elevador: dará controle de inclinação da aeronave.


Leme: este stick dá o controle de guinada.
Canal: Estes são os números do canal de controle em seu par Txr-Rxr, por exemplo. No rádio de 6 canais você pode conectar 6 servos ou 6 motores ou alguns motores e servos no receptor cujo número total não excederá 6.
Esses seis canais no receptor estão ligados aos sticks do transmissor e fornecem sinal pwm de frequência de 50 Hz com pulso de tempo de 1ms a 2ms (este mesmo sinal é usado para acionar o servo motor).
Modo: Existem 4 modos de transmissor disponíveis, nomeadamente Modo1, Modo2, Modo3 e Modo4.
Esses modos nada mais são do que a colocação do controle de canal de aileron, profundor, etc. nos manípulos do transmissor.

CH1= Aileron CH2= Elevador
CH3= Acelerador CH4= Leme
Sinais do receptor
Sinais do receptor:
O transmissor geralmente transmite sinais PCM ou PPM que são recebidos, desespalhados e decodificados pelo receptor e obtemos sinais PWM nos canais correspondentes como os do transmissor. Esses sinais PWM têm frequência de 50 Hz (período de tempo de 20 ms) e o tempo de ativação do pulso varia de 1 ms a 2 ms.
Por exemplo: se eu mover o stick do aileron no meu transmissor, o sinal pwm no canal 1 irá variar de acordo com a posição do stick.
Esses pulsos significam sinal de aceleração para motor BLDC e posição do eixo para servo motor.
|
Na hora |
Velocidade do motor BLDC |
Ângulo do eixo servo |
|
1 milissegundo |
Aceleração mínima ou zero |
00 |
|
1,5 milissegundo |
Meio acelerador |
900 |
|
2 milissegundos |
Aceleração total |
1800 |
Conectamos o sinal ao DSO para observar a forma de onda.
Você pode ver que a frequência da onda é de 45,5 Hz, o tempo de ativação no mid stick é de 1,550 ms e 1,850 ms em cerca de 75%.

75% stick

Intermediário
Se você já possui um rádio, então você deve estar bem familiarizado com todos os princípios básicos acima e ser capaz de usar seu rádio com o UAV.
Se você é iniciante, recomendo que compre Rádio Flysky CT6Bpor ser o mais barato disponível e também funcionar satisfatoriamente, também pode ser programado em pc e também pode ser usado como simulador.
Neste projeto eu usei FLYSKY CT6B rádio.


Especificações:
Canais: 6 canais
Frequência: 2,4 GHz
Potência de RF: menos de 20db
Modulação: GFSK
Tipo de código: PCM
Sensibilidade: 1024
Porta DSC: sim
Porta do carregador: sim
Alimentação: 12 V CC (1,5 AAA * 8)
Comprimento da formiga: 26mm
Certificado: CE FCC
Se você pode ver, há um total de 7 linhas e 3 colunas no receptor. Essas linhas são canal1, canal2 até o canal 6 e uma linha extra é para conectar a bateria ao receptor e também é usada para um processo chamado ligação.
1st coluna (a interna) fornece os sinais PWM correspondentes à posição do stick no transmissor.
2e coluna (do meio) é o pino de alimentação Vcc. 3terceiro coluna (externa) é o pino de aterramento.
Em um plano RC, o motor sem escova é conectado no canal 3, o servo do aileron é conectado no canal 1, os servos do leme e do profundor são conectados no canal 4 e no canal 2, respectivamente.
Mas não estamos fazendo um avião RC neste projeto, então as conexões seriam elaboradas posteriormente.
A segunda coisa na seção de comunicação é a câmera FPV (Videografia em Primeira Pessoa).
Não os usei neste projeto porque não tínhamos orçamento.
Seção eletrônica
Seção eletrônica:
Peças na seção eletrônica:
Motor sem escova
Servo motor
Bateria
Painel de controle
“Selecionando o motor para seu UAV
Como estamos fabricando um UAV que terá sensores IMU, é recomendado reduzir as vibrações ao mínimo possível, caso contrário haverá muito ruído na saída do sensor e
você obterá um comportamento inesperado do seu UAV. Para reduzir as vibrações você deve
1. Monte os sensores IMU em materiais amortecedores de vibração, como fita dupla-face, espaçadores de náilon, espuma, etc.
2. Reduza as vibrações provenientes de agentes causadores de vibração
Nosso motor BLDC será o principal agente causador de vibração em nosso UAV, então temos que escolher um motor que proporcione vibrações mínimas
Devemos escolher motores de RPM mais baixos abaixo de 1000KV para vibrações mais baixas.
Seleção de motores:
Uma das partes importantes do multirotor é o seu motor. Faz parte do sistema de energia. Na verdade, todo o sistema de energia depende da seleção do motor, portanto você deve ter muito cuidado ao selecionar o motor. Usamos motores Brushless para multirotor. O motor sem escova vem com algumas especificações importantes. Você verá essas especificações na página se estiver comprando online. Portanto, isso simplifica nosso trabalho. Para a seleção do motor, algumas especificações importantes são.
kV
Corrente máxima(A)
Diâmetro do eixo
Impulso
Peso
Lipo(3S-4S)
Suporte sugerido
Para aplicações multirotor, motores de 600-1200kV são bons. Abaixo de 600 kV ainda melhor. Baixo kV significa que você pode balançar uma grande hélice. Grande hélice significa que ele pode mover mais ar e você obterá mais impulso.
kV = RPM/V
Se você tiver motor de 600kV e bateria 3S para fornecer energia, as RPM do motor SEM CARGA seriam:
600 x 11,1 (bateria 3S) = 6660 RPM.
A classificação de corrente máxima é outro fator importante ao selecionar o motor. A seleção do ESC e da bateria depende deste valor (aprenderemos mais tarde). Deve ser capaz de funcionar com bateria lipo 3S e 4S. O diâmetro do eixo ajuda a selecionar o adaptador de suporte. Agora estamos chegando ao impulso. Na maioria dos casos, você verá o valor que o motor de empuxo pode produzir com a hélice sugerida no site. Se você se lembra, aprendemos que para levantar 1.000 gramas de quadricóptero, precisamos de um total de 2.000 gramas de empuxo. E o quadricóptero tem 4 motores, então cada motor deve ser capaz de produzir pelo menos 500 gramas de empuxo para satisfazer nossa necessidade.
4 motores x 500 gramas de empuxo = 2.000 gramas de empuxo.
Mais uma coisa é Watt.
Watt = V (Tensão) x I (Ampere)
Mais Watt, mais potência, então você também deve considerar isso ao selecionar o motor.
Mas quando se trata de selecionar o motor, você notará que existem muitas opções disponíveis para a seleção do motor e é realmente confuso, então qual motor é melhor para aplicação multirotor? Bem, você deve considerar mais algumas coisas além das especificações. Alguns deles são
Montagem do motor: Bem, a montagem do motor é mais um fator importante que você deve ter em mente ao selecionar o motor para o seu multirotor. A montagem do motor fica sob força de tração, especialmente quando você está balançando uma grande hélice e se o motor não estiver encaixado corretamente, ele pode se soltar durante o vôo e tenho certeza de que ninguém quer ver essas coisas acontecerem. Portanto, certifique-se de que o motor que você está comprando tenha um bom suporte que possa segurar o motor adequadamente sob carga pesada e da mesma forma que você possa encaixar esse suporte facilmente no quadro. No entanto, você deve sempre verificar previamente antes do voo se todas as conexões e fixadores estão devidamente encaixados. Obtenha um motor sobressalente. Então, espero ter coberto tudo para a seleção do motor.”
-Créditos
Dharmik
www.rcindia.org
O motor que usei para este projeto é

RPM/V: 1120 Kv
Watt máximo (W): 336
Corrente máxima (A): 23,2
Diâmetro do eixo (mm): 4,0
Peso (g): 70
Tamanho do motor (mm): ?28*36
Ri (?): 0,070
Esc sugerido: 30 amp
Li-Po: 2-4 células
Impulso: 1130g
Você precisará de 2 motores, pois estamos projetando um UAV de rotor duplo.
Quando encomendei o motor acima e depois de não conseguirmos voar com sucesso o UAV em 2 projetos, foi durante 3terceiro projeto que percebemos que um dos motores estava um pouco defeituoso, a lata giratória do motor tocou a base quando estava na configuração de empurrar, então o prendemos na parte superior para que agora puxasse e o problema de atrito desaparecesse.
Eu não sugeriria o mesmo motor para você porque não é de marca.
Considere o impulso fornecido pelo motor ao selecionar.
Ao selecionar um motor, você deve selecionar um de marca com boa qualidade de construção.
Se você estiver comprando os componentes da Hobbyking.com ou de outras lojas, há comentários na mesma página sobre os produtos, portanto, ao selecionar o motor, leia os comentários e não compre aqueles cujos clientes afirmam ter rolamento defeituoso ou baixa qualidade de construção .
Os motores da marca Turnigy são um dos melhores disponíveis; Estou usando o Turnigy Park 450 em meu avião RC e, como afirmei antes, não conseguia pilotar um avião RC, bati tanto, tantas vezes, mas ainda assim o motor do parque está funcionando perfeitamente.
Então eu sugiro que você compre um motor de boa qualidade com mais de 1 kg de empuxo para este projeto.
Adaptadores de suporte
Adaptadores de suporte:
Se parece com isso:

Para conectar a hélice ao eixo do motor, precisamos de algo chamado adaptador de hélice.
Anexado ao motor assim:

E o Propeller é fixado assim:

Controlador eletrônico de velocidade
Controlador eletrônico de velocidade
Como eu disse, os motores sem escova não possuem escovas, eles precisam de circuitos externos para comutar a corrente através deles, ESC é esse circuito.
Os ESCs captam a tensão CC e a convertem em tensão CA trifásica.
ESCs são classificados com base na corrente que podem suportar, como 10A ESC, 20A ESC, etc. Usei 30A ESC para meu motor, quando você seleciona seu motor, provavelmente eles informam na página do produto qual ESC você deve usar.
A classificação seria escrita como 20-30A, 30-35A, neste o 1st número é a corrente contínua que seu ESC pode suportar e 2euma é a corrente de ruptura. Então, se eu disser que precisamos de 30A ESC, então 1st o número deveria ser 30
Ou você pode ver o consumo máximo de amperagem do seu motor na página do produto e selecionar ESC cuja corrente é 1,5 vezes a corrente máxima do motor ou pelo menos 5 Amp a mais que a corrente máxima.
Isso garantirá que você não fritará seu ESC se o motor estiver ligeiramente sobrecarregado.
Guia de conexão básica:

Consulte a imagem acima, o ESC recebe a tensão CC da bateria e, de acordo com os sinais que recebem do receptor (lembre-se do sinal PWM), eles alteram a frequência de comutação dos sinais CA trifásicos de saída, alterando assim a velocidade do motor BLDC.
Você pode conectar os três fios do ESC aos fios do BLDC de qualquer maneira, sem polaridade específica.
No entanto, depois de conectar seu motor ao esc, se o seu motor girar na direção reversa da direção desejada, troque quaisquer 2 fios desses três fios para alterar a direção do motor.
ESC QUE USEI: Redbrick 30A ESC
Especificações:

Amplificadores máximos: 30A
Ubec: 5v/2A
Células: Lipólise 2~3s
Tamanho: 52 mm x 14 mm x 25 mm
Peso: 22g (Fios Incluídos)
Precisaremos de 2 ESCs, pois estamos usando 2 motores BLDC.
Servo motor Especificações:
 Comprimento do fio: 18cm
Comprimento do fio: 18cm
Peso: 44 gramas
A 4,5 V
Velocidade (seg/60): 0,08
Torque (Kg-cm): 2,0
Em 6V
Velocidade (seg/60): 0,07
Torque (Kg-cm): 2,2
Precisamos de 2 servos para nossas duas superfícies de controle, ou seja, pitch and roll.
Hélices
Hélices:
“HÉLICE
Sempre negligenciamos essa peça de plástico. Só porque é barato? Quem sabe!! Mas na aplicação multirotor a contribuição da hélice é notável. As especificações do suporte são fáceis de entender e são dialímetro e passo. O tipo de hélice também é importante, mas veremos o efeito do diâmetro e do passo no vôo do multirotor. Geralmente vemos prop com a especificação de
7×3,5
8×4,5
9×5
10×3,8
10×4,5
10×6
11×4,7
12×3,8
O primeiro valor é o diâmetro do suporte e o segundo valor é o passo. Ambos estão em polegadas.
Diâmetro: Círculo virtual que o suporte gera/ou comprimento total do suporte.
Passo: Quantidade de viagens por revolução.
Como podemos ver acima, nosso motor funciona a 6.660 RPM sem carga. Mas quando você monta o suporte nele, o RPM será reduzido. Aqui tomaremos o exemplo de dois adereços 10×3,8 e 10×6. Quando você monta um suporte de 10 polegadas de diâmetro, as RPM do motor serão reduzidas para 3600 RPM (rotações por minuto).
60 revoluções por segundo.
Nosso primeiro suporte tem passo de 3,8 polegadas. Significa que por revolução ele viajará 3,8 polegadas. Então
60 x 3,8 = 228 polegadas/seg = 5,7 m/seg
Para o segundo suporte, tem passo de 6 polegadas.
60 x 6 = 360 polegadas/seg = 9,1 m/seg
Portanto, podemos dizer que se tivermos hélice 10×3,8 nosso quadriciclo subirá no ar a 5,7 m/seg, enquanto com hélice 10×6 a taxa de subida aumentará para 9,1 m/seg.
Um suporte de diâmetro maior pode produzir mais impulso.
Então, qual hélice é melhor para nosso multirotor?
Geralmente você receberá o valor sugerido na especificação do motor, então você deve ir em frente e comprar 1-2 pares extras. Mas e se o valor da proposta não for fornecido. Você verá uma espécie de mesa com diferentes adereços, Volts, Amp, Impulso e Eficiência. Aqui você terá que tentar o método de tentativa e erro. Mas isso não significa que você balança a hélice 13 × 3,8 no motor de 1700kV.
O motor de kV mais baixo pode lidar com hélices maiores. Com o aumento do valor de kV, o tamanho da hélice diminuirá. Então você terá que manter isso em mente. Para multirotor você deve usar hélice de passo baixo se precisar de mais estabilidade e menos vibrações. Como equilibrar o suporte? Veremos na próxima parte.”
-Créditos
Dharmik
Rcindia.org
Seleção de acessórios
Neste projeto usei uma hélice 10×4,5 de 2 lâminas, bem como uma hélice 10×6 de 3 lâminas.

E lembre-se que você tem que comprar um par desses suportes, ou seja, um suporte deve estar no sentido horário e o outro no sentido anti-horário.
Na foto acima você pode ver pequenos anéis, eles são conhecidos como anéis adaptadores de hélice, eles são inseridos no hélice para que possam caber em todos os tamanhos de adaptadores de hélice.
Por que emparelhar??
Como você verá, montaremos os dois motores coaxialmente, um abaixo do outro.
Um motor girará no sentido horário, induzindo assim um contra-torque no sentido anti-horário. Se não cancelarmos esse contra-torque, assim que nosso UAV decolar, ele começará a girar no sentido anti-horário.
Esta é a razão pela qual existe um segundo ventilador na cauda do helicóptero, para cancelar o contratorque.
Em nosso UAV não há ventilador de cauda, então montaremos outro motor e girá-lo no sentido anti-horário para que o torque induzido seja no sentido horário, portanto, se o contra-torque induzido por ambos os motores for igual, eles serão cancelados cada outro e o UAV ficarão estáveis, isso é chamado de controle de guinada. Além disso, obteremos mais impulso do que usar apenas um motor.
Baterias de polímero de lítio
Baterias de polímero de lítio
Tensão e contagem de células:
As baterias de polímero de lítio usam um conjunto de células de polímero de lítio.
Cada célula tem tensão nominal de 3,7 V, tensão totalmente carregada de 4,2 V e tensão mínima de 3,0 V.
Se conectarmos duas células em série obteremos um Lipo Pack de 7,2 V e o pack seria conhecido como pack 2S.
Da mesma forma, a tensão no pacote 3s seria 11,1V.
Durante o carregamento você deve usar um carregador feito especialmente para baterias lipo.
Classificação C.
A rapidez com que uma bateria pode descarregar é a sua capacidade máxima de corrente. A corrente é geralmente classificada em C para a bateria. C é quanto tempo leva para descarregar a bateria em frações de hora. Por exemplo, 1 C descarrega a bateria em 1/1 hora ou 1 hora. 2 C descarrega a bateria em ½ ou meia hora. Todas as baterias RC são classificadas em mili Ampères-hora. Se uma bateria tiver capacidade de 2.000 mAh e você descarregá-la a 2.000 mA (ou 2 amperes, 1 ampere = 1.000 mA), ela estará completamente descarregada em uma hora. A classificação C da bateria é, portanto, baseada na sua capacidade. Uma célula de 2.000mAh descarregada a 2 amperes está sendo descarregada a 1C (2.000mA x 1), uma célula de 2.000mAh descarregada a 6 amperes está sendo descarregada a 3C (2.000mA x 3).
Todas as baterias têm limitações quanto à rapidez com que podem descarregar. Por causa disso, muitas baterias LiPoly são colocadas em paralelo para aumentar a capacidade atual da bateria. Quando 2 baterias são conectadas de positivo com positivo e de negativo com negativo, elas se tornam como uma bateria com o dobro da capacidade. Se você tiver 2 células de 2.000 mAh e conectá-las em paralelo, o resultado será o mesmo que 1 célula de 4.000 mAh. Esta célula de 4000mAh tem a mesma classificação C das células originais de 2000mAh. Assim, se as células de 2.000mAh puderem descarregar a um máximo de 5C, ou 10 amperes, então a nova célula de 4000mAh também poderá descarregar a 5C ou (4000mA x 5) 20 amperes. Este método de construção de baterias nos permite usar baterias LiPoly em correntes mais altas do que as células individuais poderiam produzir. A convenção de nomenclatura que permite decifrar quantas células estão em paralelo e quantas estão em série é o método XSXP. O número na frente do S representa o número de células em série no pacote, então 3S significa que é um pacote de 3 células. O número na frente de P significa o número de células em paralelo. Portanto, um pacote 3S4P de células de 2100mAh possui um total de 12 células em seu interior. Terá a voltagem de qualquer outro pacote 3S, pois o número de células em série determina a voltagem. Ele terá um manuseio atual de 4 vezes a classificação C máxima das 12 células individuais. Então digamos que nosso pacote 3S4P teve uma descarga máxima de 6C. Isso significa que ele tem tensão nominal de 10,8 volts (3×3,6) e taxa de descarga máxima de 50,4 amperes (2100mAh x 6Cx4P).
Seleção de baterias LiPo:
Ao selecionar baterias LiPo, devemos levar em consideração a quantidade de corrente que consumiremos da bateria.
O motor que usei deve consumir 23,2 A de corrente e como estamos usando 2 motores, a corrente total consumida seria 23,2 x 2 = 46,4A.
Portanto, a corrente consumida seria superior a 46,4A, considerando também a corrente consumida pelos servomotores.
Bateria alta mAh, mais tempo de voo
Classificação C alta, mais taxa de descarga.
Além disso, às vezes a classificação escrita na bateria não é verdadeira e é inferior ao que está escrito, por isso não devemos selecionar classificações marginais e devemos optar por um pouco mais.
Ex: no começo estávamos usando uma bateria Turnigy 2200mAh 25-30C que deveria permitir uma taxa de descarga de 2200 x 25=55A, mas mesmo assim depois de alguns vôos observávamos que a bateria inchava um pouco e a cada teste que passava a bateria estava soprando e eventualmente a capacidade da bateria foi reduzida a tal ponto que nosso UAV não decolaria mais.
Portanto, tome cuidado especial ao selecionar a bateria, pois ela é a principal fonte de energia e também é cara.
Também não utilize baterias cujo peso exceda 300 gramas.
Então, depois de estragarmos nossa primeira bateria, compramos esta:
Especificações:

Capacidade: 3300mah
Tensão: 11,1 V
Taxa de descarga contínua: 25°C
Taxa máxima de explosão: 50°C
Configurações: 3S1P
Taxa de carga: 1C
Tamanho: (A)20mm*(L)44mm*(L)135mm
Peso: 247g
Cor do PVC: Azul
Conector: XT60
Placa de controle de vôo
Placa de controle de vôo:
O componente mais importante de um multirotor é a placa controladora de vôo.
A placa de controle de vôo possui sensores IMU com um microcontrolador para realizar tarefas de controle.
Agora, o que isso controla.
Uma aeronave VTOL precisa ser estável em 3 eixos, ou seja, eixos de inclinação, rotação e guinada para que possa pairar no ar. Os sensores IMU detectam a orientação da aeronave e enviam os dados para o microcontrolador, o microcontrolador processa os dados brutos para estimar os ângulos e fornece compensação de erros para trazer a aeronave de volta à sua posição inicial.
E faz isso com incrível velocidade e precisão, por isso precisamos de um controlador para UAVs VTOL.
Existem muitas placas de controle multirotor por aí, como APM, Openpilot mega, multiwii, kk multicopter etc.
Eu usei abaixo dois:
Placa HK v3

Especificações:
Tamanho: 50,5 mm x 50,5 mm x 23,5 mm
Peso: 14,5 gramas
CI: Atmega328 PA
Giroscópio: Murata Piezo
Tensão de entrada: 3,3-5,5V
Sinal do receptor: 1520us (4 canais)
Sinal para ESC: 1520us
Características:
1. Controlador Atmega 328.
O microcontrolador usado é o controlador atmega 328 8bit avr.
2. Temporizadores de 16 bits em AVR.
3. 3-DOF, apenas sensores giroscópios.
O sensor giroscópio é um sensor IMU e detecta a velocidade angular quando o UAV é inclinado. Leia também sobre Sensor de inclinação
4. Analógico Murata Piezo Gyro
Os sensores giroscópios usados são alguns giroscópios murata piezo baratos, não muito sensíveis.
5. Configurando ganhos de PI usando potenciômetros integrados.
A placa de controle possui 3 potenciômetros integrados para alteração do ganho P e I do controlador PID utilizado no software. Esses ganhos definem em quantos graus de inclinação do UAV a superfície de controle deve inclinar em quantos graus.
6. Pode suportar até 6 UAVs de rotor
Também podemos fazer quadcopter (4 rotores) ou hexcopter (6 rotores) usando esta placa.
7. Sem autonivelamento.
Como os giroscópios medem a taxa angular, eles não conhecem a orientação real da aeronave, a única coisa que fazem é tentar evitar a inclinação do UAV.
8. Estimativa de ângulo: apenas giroscópio
9. Sem AHRS e fusão de sensores.
AHRS e fusão de sensores são algumas técnicas avançadas que fornecem estimativa de ângulo muito precisa e controle de UAV, mas não são empregadas nesta placa.
10. Sem cardan de câmera
Não possui gimbal de câmera para estabilizar a câmera durante o vôo.
11. Menos sujeito a vibrações.
Um mérito é que ele é menos sujeito a vibrações por causa dos giroscópios murata baratos.
2) Placa KK2.0

Especificações:
Tamanho: 50,5 mm x 50,5 mm x 12 mm
Peso: 21 gramas (campainha Piezo Inc)
CI: Atmega324 PA
Giroscópio: InvenSense Inc.
Acelerômetro: Anologue Devices Inc.
Nível automático: Sim
Tensão de entrada: 4,8-6,0 V
Interface AVR: padrão de 6 pinos.
Sinal do receptor: 1520us (5 canais)
Características:
1. Controlador Atmega 324.
Esta placa usa o controlador atmega 324 avr, possui mais UART e SPIs do que atmega 328.
2. Temporizadores de 16 bits em AVR.
3. 6-DOF, giroscópio de 3 eixos e acelerômetro.
A adição mais incrível nesta versão da placa é um acelerômetro, o que a torna uma placa IMU de 6 DOF.
4. Sensores digitais MEMS ultrassensíveis.
Ao contrário dos giroscópios murata anteriores, esta placa usa giroscópios e acelerômetros MEMS mais sensíveis.
5. Configurando ganhos de PI usando UI LCD.
Outra adição incrível nesta placa é a interface do usuário LCD, que facilita a configuração e também a definição de ganhos de PI, não é mais necessário gravar o firmware nesta placa, a única coisa é que temos que selecionar o tipo de UAV e voar.
6. Pode suportar até 8 UAVs de rotor.
Sim, podemos fazer octocopter com esta placa.
7. Capaz de autonivelamento
Como os acelerômetros podem determinar a orientação do UAV no espaço, agora é possível ter a função de autonivelamento nesta placa
8. Estimativa de ângulo: Gyro & Accel.meter.
Ele usa técnicas de fusão de sensores para estimar ângulos usando dados de acelerômetro e giroscópios, o que aumenta a precisão e proporciona melhor função de autonivelamento.
9. Usa AHRS Algo e Sensor Fusion para estimativa precisa de ângulo
Utiliza um Sistema de Referência de Atitude e Rumo, aquele utilizado em aeronaves e foguetes, e é o sistema mais eficiente para UAV. Também estima ângulos de Euler, que é uma técnica de representação de um corpo no espaço.
10. Gimbal da câmera
Também podemos conectar a câmera a um gimbal para obter fotografias aéreas estáveis.
11. Mais sujeito a vibrações
Como utiliza sensores IMU altamente sensíveis, também é muito sensível às vibrações.
Usaremos a placa kk2.0, pois tentei usar a placa HK v3.0 sem sorte.
Diagrama de conexão:

Mais sobre como montar tudo e configurar a placa para funcionar para nós após a seção de aeromodelismo.
Seção de aeromodelismo
Seção de aeromodelagem:
Usamos depron e tiras de madeira para construir nossa moldura.
Você pode fazer seu próprio design usando o material que desejar, mas tente torná-lo o mais leve possível.
O peso dos nossos UAVs é de 1200 gramas
Abaixo estão as fotos que darão uma boa ideia sobre a construção da moldura.

Figura : Completo
Você pode ver a fita de papel na hélice, ela serve para equilibrar as hélices.

Figura :Vista do topo

Figura : superfície de controle

Figura: placa FC

Figura : ligação à superfície de controle

Figura : fundo
Construção da estrutura externa e montagem do motor
Construindo moldura externa
A parte circular preta é uma folha de depron colada para formar um círculo de 32 cm de diâmetro,
possui 4 pilares de madeira de 29 cm de altura em sua circunferência conforme mostram as imagens abaixo.


Suporte do motor
Fizemos um suporte + para o motor, como o suporte do motor possui 4 parafusos, você deve apertar todos os parafusos para evitar vibrações. Também devido às vibrações, a porca pode começar a se soltar e cair, então aperte os parafusos de cabeça para baixo, ou seja, a porca em cima.

Figura: Suporte do motor

Figura : ESC
Ambos os ESCs estão no próprio suporte fixados com fita de papel, você pode alterar o posicionamento dos ESCs para equilibrar o peso do UAV no final se ele parecer desequilibrado.
Para nós, a posição acima funcionou bem.
Servo e ligações
Servo
Servos são usados para mover a superfície de controle; temos duas superfícies de controle, portanto, serão necessários dois servos.
Observe a posição dos servos no UAV, a posição.

Selecione também o diâmetro do cilindro de sustentação e despronção com cuidado, caso contrário a folga entre a hélice e o servo seria muito baixa.

Ligações
Para transferir o deslocamento angular do eixo de controle para as superfícies de controle precisaremos das ligações.
As ligações primeiro converterão o deslocamento circular do servoeixo em deslocamento linear e depois novamente em deslocamento angular da superfície de controle.
Portanto, conectamos a haste de ligação usando dobradiças na buzina do servo e no eixo da superfície de controle.

Você pode projetar uma ligação, se desejar diferentes superfícies de controle e deflexão do servo.
Aqui está a fórmula para calcular isso:

Você pode ver x e y na imagem acima. qx é a deflexão do ângulo da superfície de controle e qy é a deflexão do ângulo da buzina do servo.
Se você deseja alta deflexão da superfície de controle para baixa deflexão da buzina do servo, selecione x
No nosso caso selecionamos x=y=1,5 então nosso qx =qvocê.
Selecione x>y se você tiver um servo de alto torque, mas de baixa velocidade e y>x se você tiver um servo de baixo torque e alta velocidade.
Projeto de superfície de controle
Projeto de superfície de controle
Você pode usar a fórmula abaixo para calcular o comprimento (largura) da corda da superfície de controle para um determinado torque do servo ou vice-versa.
O modelo matemático: “t = (AMPC2LV2) / (4RT)” onde:
t = servotorque
A = pecado(S) * tan(S) / tan(s)
S = ângulo da superfície de controle em relação ao neutro
s = ângulo do braço do servo em relação ao neutro
M = peso molecular do ar (~28,6 g/mol)
P = pressão do ar (1 atm)
C = comprimento médio da corda da superfície de controle
L = comprimento médio da superfície de controle
V = velocidade no ar
T = temperatura do ar (~290 K)
R = constante de gás ideal (82,056 atm cm3 / mol K)
Ou use nosso design:

Na imagem CAD abaixo você terá uma ideia melhor do formato da superfície de controle.


Fizemos uma superfície de controle em coroplasto e inserimos finas hastes de metal e as colamos com bondtite.
Um lado terá batente como acima e um lado será conectado ao servo via ligação conforme já discutido.

A folga entre o motor inferior e a superfície de controle é de 1 cm.
Da mesma forma, há uma folga de 1,5 cm entre o motor e a montagem da placa FC, conforme mostrado abaixo

O comprimento da superfície de controle que usamos é de 30 cm. e a altura dessa superfície de controle é de 5,5 cm.
O corte angular entre a superfície de controle de rotação e inclinação é de 450 tal não deve haver qualquer tipo de contato entre as duas superfícies de controle.

Projeto de montagem em placa FC
Projeto de montagem em placa FC
O suporte da placa FC é parafusado 1,5 cm acima do motor superior. O suporte é uma tira retangular de madeira que contém a bateria Lipo e a placa FC.
A tira de madeira deve ser bem fixada de forma que haja vibrações mínimas.
Ao visualizar a imagem abaixo você poderá entender com mais clareza.



Como você pode ver o FC é montado em um pedaço de espuma e espaçadores de náilon para
para amortecer as vibrações.
Você pode usar fita dupla face ou a embalagem que vem o kk2 também é uma boa escolha.
Conexões

O diagrama acima mostra claramente as conexões que você deve fazer.
Observe os pinos de sinal no receptor e na placa FC e conecte-os adequadamente, para pinos de saída, ou seja, motores e servos, geralmente o fio laranja ou branco é o pino de sinal, então conecte com cuidado ou você danificará a placa e o receptor.
Como você pode ver, as colunas do meio e externa são vcc e gnd respectivamente e todos os pinos na mesma coluna estão conectados juntos, exceto os pinos de sinal e os pinos superiores do motor.
Configurando UAV
Configurando UAV
Depois de montar tudo, siga as etapas para configurar e pilotar seu UAV.
Ligue a energia e pressione o botão menu e entre no submenu “Teste do receptor”.
Mova cada canal do seu transmissor e verifique se a direção exibida corresponde aos movimentos do stick. Se eles discordarem, inverta o canal do seu transmissor.
Use os trims ou sub-trims e ajuste os valores do canal mostrados no LCD para zero.
Entre no submenu “Load Motor Layout” e escolha a primeira opção, ou seja, 'ÚNICO-CÓPTER 2M 2S'.
Entre no submenu “Mostrar layout do motor” e confirme o seguinte.
1st um é o motor na direção CW
2e também é motor, mas na direção anti-horária
3terceiro é rolo servo
4º é pitch servo
Entre no submenu “PI Editor” e verifique os valores corretos de ganho de PI. Use valores válidos conhecidos ou os padrão.
Usamos esses valores
Eixo de rotação/inclinação:
Pganho = 246
Plimit = 100
De novo = 25
Ilimite = 20
Eixo de guinada:
Pganho = 281
Plimit = 31
Mais uma vez = 0
Ilimite = 0
Agora você pode montar as hélices e testá-las.
Primeiro ative o nível pessoal, dando 'Leme direito e aceleração zero' juntamente com 'Aileron direito'.
Agora arme-o com o leme direito e aceleração zero por alguns segundos. Ele emitirá um bipe e o LED acenderá. Não o arme antes de colocar o UAV no chão e se afastar 5 metros.
Desarme-o após pousar, segurando o leme para a esquerda com aceleração zero. Ele emitirá um bipe e o LED apagará.
Aumente o ganho de Roll e Pitch I (observe a diferença do ganho P) até que ele voe para frente sem subir ou descer.
Ative o autonivelamento segurando o aileron direito enquanto o arma ou desarma. Desligue-o segurando o aileron esquerdo.
Descrições dos submenus.
“Editor PI”:
Ajuste as configurações de ganho PI aqui. Use os botões PREV e NEXT para destacar o parâmetro que deseja alterar e pressione o botão CHANGE. Para ajustar Roll e Pitch ao mesmo tempo, consulte o submenu “Mode Settings”.
“Teste do receptor”:
Para verificar a saída do receptor.
“Configurações do modo”:
Item “Autonivelamento”: Como será controlada a função de autonivelamento:
“Stick”: Ative o autonivelamento segurando o aileron para a direita ao armar ou desarmar. Desligue-o com o aileron esquerdo.
“AUX”: O canal do interruptor AUX controla a função de autonivelamento.
Item “I part of PI”: Como a função de manutenção de rumo será controlada:
“Ligado”: Sempre ligado.
“AUX”: O canal do interruptor AUX controla a função de manutenção de rumo.
Item “Armar”: Como a função de manutenção de rumo será controlada:
“Stick”: braço com leme direito e aceleração zero. Desarme com leme esquerdo e aceleração zero.
“Ligado”: Sempre ligado. Cuidado com este. Use-o somente quando o FC não controlar nenhum motor, por exemplo, ao usá-lo para estabilização de aviões.
Item “Link Roll Pitch”:
“On”: Edite os parâmetros de ganho Roll e Pitch juntos.
“Off”: Edite os parâmetros de ganho Roll e Pitch separadamente. Use-o quando o multicóptero tiver massa inercial diferente em eixos diferentes.
“Escala de bastão”:
Aqui você pode ajustar a resposta do stick ao seu gosto. Um número mais alto dá uma resposta mais alta.
Semelhante ao ponto final ou ajuste de volume no seu transmissor. Você também pode ajustar seu
transmissor para ajustar a resposta do stick e use a escala do stick se quiser ainda mais resposta.
“Diversos. Configurações”:
Item “Aceleração Mínima”: Ajuste apenas o suficiente para manter todos os motores funcionando quando a aceleração estiver acima de zero.
Item “LCD Contrast”: Ajusta o contraste do LCD.
“Configurações de autonível”:
Item “Ganho de autonivelamento”: O poder do autonivelamento. Um número maior é mais forte.
Item “Limite de autonivelamento”: Limita a potência máxima do autonivelamento. Um número maior é um limite maior.
“Teste do Sensor”: Exibe a saída dos sensores. Veja se tudo mostra “OK”. Mova o FC e veja se os números mudam.
“Calibração Acc”: Siga as instruções no LCD. A calibração só é necessária uma vez por configuração inicial.
“Calibração Esc”:
Instruções:
1: Importante: TIRE AS HÉLICES OU DESCONECTE UM FIO DO MOTOR!!
2: Desligue a alimentação do FC.
3: Ligue o transmissor e coloque o acelerador no máximo.
4: Pressione os botões 1 e 4 e continue pressionando até a última etapa. Soltar os botões cancela a calibração.
5: Ligue o FC
6: Aguarde até que o ESC emita um sinal sonoro calibrado de aceleração total. Demora alguns segundos, depende do ESC.
7: Abaixe o acelerador para marcha lenta.
8: Aguarde o sinal calibrado do acelerador de marcha lenta.
9: Solte os botões.
“Mostrar layout do motor”:
Mostra a configuração graficamente. Use para verificar sua compilação e/ou sua tabela de mixer personalizada.
“Layout do Motor de Carga”:
Carrega uma das muitas configurações fixas. A configuração carregada pode ser modificada posteriormente. Nós escolhemos helicóptero único 2m 2s.
GUIA DE AJUSTE:
1: Certifique-se de que o KK2 leia os neutros do stick do transmissor. Vá para o menu “Teste do receptor” e use os ajustes para zerar os valores.
2: Vá para o menu “PI Editor” e defina P como 150 e I como zero para o eixo Roll e Pitch. É necessário apenas editar o eixo de rotação, o eixo de inclinação será automaticamente alterado para os mesmos valores do eixo de rotação. Deixe o limite P e o limite I sozinhos, raramente é necessário alterá-los.
3: Passe a aeronave e altere os ganhos conforme abaixo.
Ganho de rotação/inclinação
Aumente o ganho p gradativamente e veja a resposta em cada voo, se oscilar rapidamente então significa que o ganho P está muito alto, então diminua um pouco até que as oscilações desapareçam.
Ganho de guinada
Aumente os ganhos de guinada até ouvir sons oscilantes do seu motor ou o seu UAV ganha ou perde altitude.
Você pode tentar estes
Eixo de rotação/inclinação:
Pganho = 246
Plimit = 100
De novo = 25
Ilimite = 20
Eixo de guinada:
Pganho = 281
Plimit = 31
Mais uma vez = 0
Ilimite = 0
Observe que essas configurações podem não funcionar para você, então você terá que encontrar a sua própria usando tentativa e erro.
Vídeos
Vídeos
Código-fonte do projeto







