Neste artigo, iremos detectar um incêndio florestal usando uma rede de sensores IoT e fabricar um dispositivo portátil com bateria. Obter informações a tempo sobre o risco de incêndio em uma floresta pode impedir a propagação do incêndio florestal. A rede de sensores pode fornecer a localização específica do incêndio, pois já sabemos onde os sensores estão instalados.
Vamos discutir como detectaremos a localização exata do incêndio florestal pela rede de sensores IoT.
Propósito
1. Detectar – Sentir o incêndio florestal
2. Relatório – Relatório para o servidor
3. Localizar – Localize o local da ocorrência do incêndio
4. Reagir – Alertando a equipe de incêndio florestal
Arquitetura

Figura 1.

Figura 2.
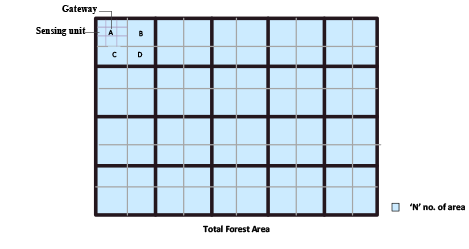
Estratégia
1. Podemos dividir a floresta em 'N' não. de áreas como visto na Fig 1.
2. Cada área é novamente dividida em quatro células – A, B, C e D. Cada célula terá várias unidades de detecção, o que é mostrado na fig. 2. Os sensores não estão distribuídos uniformemente; alguns sensores estão em maior quantidade do que outro sensor.
O objetivo de usar a quantidade desigual de sensores:
Alguns parâmetros ambientais não mudam rapidamente e podem ser detectados por menos sensores numa grande área.
3. A unidade do sensor consiste principalmente em três partes:
– Unidade de sensor
– Unidade RF (radiofrequência) com (controlador embutido)
– Unidade de gerenciamento de bateria
A unidade sensora consiste em vários nós sensores, conforme descrito na fig.2, e cada nó terá um módulo RF e uma bateria para fonte de alimentação.
Unidade RF coleta os dados dos nós sensores e os transmite ao Gateway. O Gateway escuta os dados recebidos de nós pré-registrados e encaminha esses dados para as estações base SIGFOX. A partir dessas estações base, os dados são transferidos para o backend SIGFOX e, nesta arquitetura acima, estamos usando nossa nuvem customizada. Todos os dados serão transferidos para a nuvem por meio da função de retorno de chamada SIGFOX. Nossa nuvem personalizada deve fazer o processamento principal apenas no final da nuvem; a nuvem tomará as decisões e fornecerá os alertas à equipe em caso de detecção de incêndio.
Unidade de bateria– Inclui a bateria, que descrevemos mais adiante neste relatório.
Mais alguns detalhes sobre o processamento local de dados
Usaremos nós transceptores RF de comunicação de dados de curto alcance. Os nós estarão se comunicando com o Gateway local, que estará presente em cada célula. Agora, o Gateway em uma extremidade coletará os dados dos nós sensores e transmitirá os dados para o módulo SIGFOX (os detalhes do módulo estão descritos na seção do módulo SIGFOX). Este módulo se comunicará de longo alcance com as estações base.
A razão para escolher o trans-receptor RF de curto alcance:
1. O consumo de energia no modo de transmissão e recepção será baixo, o que ajudará no baixo consumo geral de energia.
2. Redução de custos.
Seleção do módulo SIGFOX
O módulo é selecionado para a região RCZ1, que inclui países europeus e abrange o Oriente Médio. A faixa de frequência operacional para esses países é de 868 MHz.
Podemos usar o SoC trans-receptor AX-SIGFOX-API (up-link e downlink) que atenderá aos nossos requisitos de aplicação com a funcionalidade adicional.
 Diferentes unidades de sensores com causas de falso alarme e sua técnica de prevenção
Diferentes unidades de sensores com causas de falso alarme e sua técnica de prevenção
Unidade de detecção
Podemos detectar o incêndio usando a seguinte unidade de detecção.
1) Detector de fumaça e gás
Detector de fumaça – Para detecção precoce de incêndio, podemos usar dois tipos de detectores de fumaça
-Detetor de fumaça por ionização – Resposta rápida para incêndios com chama aberta (alta energia), pois este tipo de incêndio produz pequenas partículas de fumaça.
-Detector de fumaça fotoelétrico – Resposta rápida a um incêndio latente.
Detector de gás Os sensores devem ser suficientemente sensíveis para detectar concentrações de fumo muito baixas. Por esta razão, devem ser utilizados sensores de gás ou uma combinação de sensores de gás juntamente com um sistema de aspiração. Consiste principalmente em sensores de gás CO2, CO, NO2, CH2, H2.
Causas de alarme falso por detector de fumaça
Nevoeiro e nuvem, objetos que não fumem, como plantas e animais.
Solução
Também podemos reduzir a taxa de detecção falsa considerando o resultado do sensor de gás e outros sensores (calor e umidade).
2) Detector térmico
A chama ardente e aberta aumenta a temperatura do ambiente. Usando um sensor de temperatura, podemos detectar a mudança nas condições ambientais.
Temos dois modos de detecção de temperatura
-Taxa de aumento – Isso responderá rapidamente ao fogo de chama alta
-Temperatura fixa – Isso responderá ao aumento lento da combustão lenta ou do fogo no solo quando a temperatura atingir um nível de limite predefinido.
Causa do alarme falso – Luz solar
Solução
Analisando a temperatura de toda a floresta- Em um dia ensolarado, a temperatura aumentará uniformemente em toda a região da floresta e todos os sensores darão aproximadamente a mesma leitura.
Considerando a temporada daquela área.
Ao implementar o detector térmico em uma área sombreada
3) Detector de chama
Os detectores de chama detectam opticamente a radiação ultravioleta (UV) e infravermelha (IR) emitida pelas chamas. Os detectores de chama são dispositivos de “linha de visão” e estão sujeitos a serem bloqueados por objetos colocados à sua frente.
Modo de detector de chama
Podemos usar nosso detector em modo de varredura para evitar que o detector de chamas seja coberto por qualquer obstáculo. Neste modo, o dispositivo girará 360° e parará quando o sinal for recebido. O detector só alertará quando o sinal persistir por um período específico de tempo.
Causas de um alarme falso: luz solar e objeto sem fumaça
Solução
Usando esses filtros, que bloqueiam a radiação solar.
No caso de objetos sem fumaça, podemos considerar também o resultado de outros sensores.
4) Detector de velocidade do vento e detector de umidade
A temperatura afeta a umidade e também a velocidade do vento. Medindo ambos os parâmetros, podemos detectar incêndio naquela área.
Algoritmo de detecção
O algoritmo desempenha um papel crucial na minimização da taxa de falsos alarmes em nosso sistema. Em vez de confiar nos dados de um ou dois sensores, analisaremos os dados de todos os sensores, resultando em menos chances de alarmes falsos.
Dados do detector de gás e temperatura
Gás S, Temp é igual a
((NH2,KH2 + NCO filtrado,KCO + NCH filtrado,KCH + NCO filtrado,KCO + NCO2 filtrado,KCO2 filtrado)(1+NTemp,KTemp filtrado) ) Gás S, Temp >= Valor limite => Ativar temperatura e gás sensor booleano
Dados de detector de humidade e fumaça
S Umidade, Fumaça = (Umidade >= TH) (Fumaça >= Ts) => Ativar sensor de umidade e fumaça booleano
TH = Nível limite de umidade
Ts = Nível limite de fumaça
Dados do detector de chama
S flame = (dados de chama >=Tt) => Ativar sensor de chama booleano
Tt =Tempo limite para detector de chama
Os dados medidos do sensor de fumaça, gás, temperatura, umidade e chama serão transmitidos ao nosso Gateway e inseridos no algoritmo de detecção/nuvem personalizada.
A decisão de “alarme ativo/sem alarme” resulta dos dados de todos os sensores comparados ao valor limite.
Alarmes falsos causados pela atividade humana
– Acampamento e fogueira
Solução
Permissão da autoridade do departamento florestal
Outras técnicas para reduzir alarmes falsos
I. Sistema FWI (sistema de índice climático de incêndio)
Este sistema medirá o risco de incêndio florestal ou determinará a possibilidade de incêndio florestal. É composto por seis componentes que respondem individual e coletivamente pela ocorrência de incêndio.
Se a FWI medir o elevado risco de incêndio florestal, então há menos probabilidades de alarmes falsos e, no caso de baixo risco de incêndio, podemos verificar novamente a fiabilidade do alarme.
II. Animal como Sensor Biológico – Dois métodos de detecção diferentes podem ser implementados. Esses métodos são o método de detecção térmica (TD) para medir mudanças instantâneas de temperatura e o método de classificação de comportamento animal (ABC) para classificar mudanças repentinas nos animais.
Unidade de tomada de decisão
Nuvem personalizada
A nuvem pessoal aceitará os dados do backend SIGFOX por meio das APIs de retorno de chamada. A nuvem executará principalmente estas operações:
1. A nuvem coletará os dados do sensor e registrará os dados com o ID do dispositivo, hora, localização e intensidade do RSSI.
2. O alcance de detecção aceitável será armazenado na nuvem e o valor de detecção em tempo real será comparado e processado apenas na nuvem.
3. Com base nos cálculos de back-end na nuvem, a nuvem alertará a equipe em caso de detecção de incêndio.
4. A nuvem será altamente protegida com segurança TLS habilitada.
Maximizando a longa vida
Gabinete
Usaremos o sistema de classificação de proteção de ingresso (IP) para proteger efeitos ambientais como poeira, sujeira, vento, etc. Nosso gabinete é feito de polímero, que pode suportar altas temperaturas e outros extremos ambientais.
-Uso de gaiola de Faraday para bloqueio de campos eletromagnéticos.
-As unidades detectoras são propensas a poeira, corrosão e condições ambientais extremas; para eles podemos fazer uma tampa protetora em metal sinterizado que evita que se sujem com poeira e umidade
Hora de dormir
Como a rede SIGFOX pode aceitar apenas 140 pacotes por dia, não precisamos amostrar os dados do sensor a cada segundo ou minuto. Estaremos habilitando suspensão cíclica ou suspensão de pinos nos nós sensores. Isto reduzirá significativamente o consumo de energia do dispositivo; isso maximizará o ciclo de vida do dispositivo.
Nuvem personalizada
Estamos fazendo todo o processamento apenas na nuvem; a nuvem decidirá o caso de ocorrência de incêndio e enviará um alerta. Isso reduzirá significativamente o consumo de energia do nosso dispositivo.
Transmissão de dados e duração da bateria
Como nosso dispositivo SIGFOX só pode receber 140 mensagens por dia, dividimos a área florestal total na seção 'N' em nosso projeto proposto. Cada seção é então dividida em nove células; cada célula consiste em 9 nós. Se tomarmos uma média, podemos enviar 14 mensagens ou alertas de cada nó por dia.
-Por dia, cada nó só ficará ativo cerca de 14 vezes e consumirá mais energia; no resto do tempo, ele permanecerá no modo de suspensão.
-Se o tempo total para transmissão de dados de um nó para o módulo RF for de aprox. 200ms. Então cada nó permanecerá ativo por cerca de 3s (14*200ms) por dia.
Tempo ativo de um nó
-Por dia de tempo ativo – 3s
-10 anos de tempo ativo – 3h aprox.
-De acordo com o cálculo teórico, o consumo médio de energia de cada nó é de aprox. 1,6 W por dia.
Cálculo da capacidade da bateria e tempo de descarga.
Por exemplo, tensão nominal da bateria = 3,6V
A capacidade nominal da bateria = 2000mAh
Taxa de descarga = 0,25C ou 500mA (taxa de descarga de acordo com o consumo de corrente de cada nó)
Tempo total de descarga em horas. = Capacidade da bateria (mAh)/Corrente de descarga (mA).
T = 2000/500mA = 4h
Portanto podemos usar uma bateria de 2000mAh ou superior, que melhor se adapte ao nosso design. Agora discutiremos a química/tipo da bateria, que deve ter uma vida útil longa.
Seleção de bateria
A bateria adequada para o nosso sistema são as baterias primárias, pois elas têm uma longa vida útil, ampla faixa de temperatura e baixa taxa e custo de autodescarga. Como a tensão máxima de operação do nosso dispositivo não é superior a 4 V – 5 V, podemos usar baterias primárias à base de íons de lítio, pois a bateria de íons de lítio tem alta densidade de energia e longa vida útil.
Tipo de Bateria
Eu. LiSOCl2
II.LiMnO2
III. Baterias da série XOL
Todas as baterias acima têm vida útil de até 10 anos com baixa corrente de autodescarga e ampla faixa de temperatura.
Outra técnica
Sistema de coleta de energia
Para aumentar a vida útil da bateria, também podemos adotar o sistema de coleta de energia como bateria primária para operar nosso sistema, portanto, não podemos carregá-las pelo sistema de coleta de energia. Mas podemos operar o nosso dispositivo diretamente através de um sistema de captação de energia.
Abaixo está a lista de alguns sistemas disponíveis que podem ser instalados de acordo com a fonte de energia disponível
eu. Sistema solar – Este sistema precisa de luz solar para gerar energia suficiente.
ii. Sistema eólico – Pode ser instalado onde há fluxo de vento frequente
iii. Sistema de energia eletromagnética – Pode ser instalado próximo ao sistema de transformador que produz ondas EM.
Em breve descrição
Como funciona
Por exemplo, se considerarmos um sistema de energia eletromagnética (EM), alguns transdutores convertem a onda EM em corrente elétrica. Precisamos usar o painel de cobre com o transdutor para detectar a onda EM do ambiente. A energia convertida do transdutor é então usada para alimentar nosso dispositivo.
Para outra fonte de energia, como a energia eólica ou solar, precisamos de um sistema de detecção diferente que capte a energia solar/energia eólica.
Fonte de onda EM
A fonte de energia para ondas EM pode ser um transformador que emite ondas EM. Se colocarmos nosso dispositivo próximo à linha do transformador, o sistema de coleta de energia poderá capturar a onda EM emitida pelo transformador.
Unidade de comutação
Para alimentar nosso dispositivo com um sistema de coleta de energia, precisamos de um circuito de comutação. Podemos usar uma chave eletrônica (transistor) ou uma chave eletromecânica (relé), que melhor se adapta ao nosso projeto. Isso mudará nosso dispositivo da bateria para o sistema de coleta de energia. A troca ocorrerá somente quando nosso sistema de coleta de energia armazenar energia suficiente para alimentar nosso dispositivo.
Combinação de sistema de coleta de energia
Para maior armazenamento de energia, podemos usar dois ou três sistemas de captação de energia simultaneamente, como uma combinação de sistemas solares e eólicos ou dois sistemas EM.
É assim que podemos detectar incêndios em florestas usando uma rede de sensores IoT.







