Como discutimos anteriormente sobre o incrível mundo da robótica, acredita-se que robôs totalmente autônomos só foram desenvolvidos na segunda metade do século XX. Em todos esses anos, muitas novas invenções ocorreram, de drones a nanorrobôs; sem esquecer os robôs animais e humanóides que se parecem com seres vivos.
Porém, não é isso! Há muito mais do que foi explorado até agora. O futuro da robótica seria redefinido pela robótica suave, um conceito ainda desconhecido das massas. Vamos dar uma olhada nos petiscos do conceito e compreender como ele se tornou a nova moda no mundo da robótica.

Uma mão robótica macia (imagem cortesia: Tech Gen Mag)
O que é Robótica Suave?
Soft Robotics é um ramo da Robótica que trata do projeto, desenvolvimento e construção de robôs macios e flexíveis com movimentos semelhantes aos dos organismos biológicos. Estes utilizam materiais macios e deformáveis para serem construídos, como silicone, plástico, borracha, tecido ou peças mecânicas como molas. Devido à sua alta flexibilidade, os robôs flexíveis podem interagir com seu ambiente com bastante facilidade e podem sofrer grandes deformações dependendo da conformidade estrutural.
Os seres vivos são naturalmente programados para se mover e interagir com o ambiente. Isso ocorre porque seu corpo é construído com atuadores, sensores, pinças, além de estruturas duras e moles. O mesmo princípio se aplica aos robôs leves; para fazê-los interagir facilmente com o meio ambiente e proporcionar uma manobrabilidade biológica, esses robôs são construídos com diversos materiais.
A Soft Robotics está remodelando a robótica
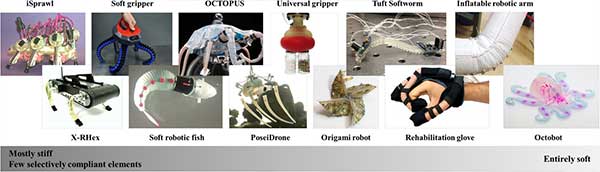
Gama de robôs, de rígidos a macios (imagem cortesia: Science Robotics)
Mudanças significativas estão acontecendo em relação à melhoria dos materiais, remodelando literalmente o campo da robótica. O conceito de robótica suave está dando lugar a custos reduzidos, capacidades aprimoradas, bem como interações mais seguras com humanos. O conceito modificou completamente a forma como os robôs convencionais em aplicações automotivas, médicas e industriais eram construídos e operados.
A maioria desses robôs é inspirada em criaturas flexíveis como polvos e lagartas. Eles são construídos com materiais que lhes permitem moldar sua forma e movimento de acordo com o ambiente. Parecendo ser uma estrutura composta apenas por ossos e articulações, os robôs macios são capazes de esticar, torcer, girar ou esmagar de maneiras inimagináveis; muito parecido com um organismo vivo.
Tecnologia de Robótica Suave
Muito parecido com os dispositivos modernos que são desenvolvidos em formas mais portáteis em comparação com os modelos da geração anterior, os robôs leves abandonaram os esqueletos rígidos dos robôs de máquinas pesadas anteriores. Esses robôs modernos podem transformar sua forma e tamanho, envolver objetos, interagir com humanos com mais segurança e podem até segurar objetos tão frágeis quanto um tomate.
De acordo com o Programa de Robótica SRI, existem 3 tecnologias principais responsáveis por esta evolução da robótica. Estes são:
Polímero Eletroativo:

Polímero eletroativo, também conhecido como músculos artificiais (imagem cortesia: sri)
Polímero eletroativo ou músculos artificiais se expandem quando a voltagem é aplicada e se contraem quando a voltagem é removida, convertendo assim energia elétrica em movimento mecânico. Isso ajuda o robô a se mover com a mesma destreza que os humanos. O material também facilita ao robô alterar a textura da superfície e desenvolver películas que possam sentir pressão e contato.
Esses polímeros podem até ser incorporados em roupas e tecidos para medir movimentos e forças na forma de wearables. Na verdade, muitas organizações estão trabalhando em materiais poliméricos com base no licenciamento SRI para uma ampla gama de aplicações onde são necessárias atuação e detecção suaves, flexíveis e eletricamente ativas.
Pinças macias

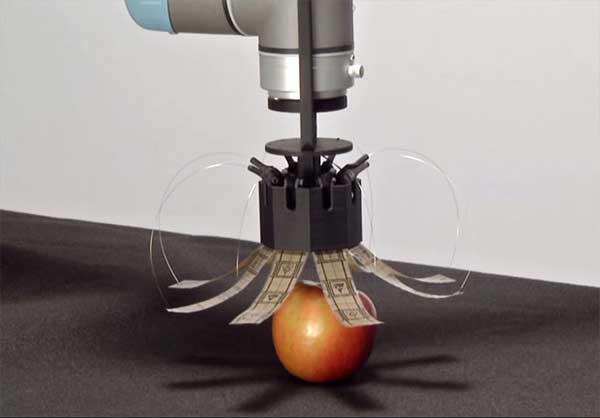
Garras macias (imagem cortesia: natureza)
Ao contrário das garras rígidas, suas contrapartes macias precisam de detecção e controle mínimos para pegar objetos. Por exemplo, em pinças de bloqueio, um saco flexível é preenchido com uma substância semelhante a um pó, de modo que possa se moldar em torno de um objeto de qualquer formato. Em seguida, ocorre um processo de vácuo que torna a pinça rígida para agarrar qualquer objeto por fricção, sem a necessidade de nenhum processamento complexo.
Tecnologia de eletroadesão
Tecnologia de eletroadesão (imagem cortesia: lenergreek)
Nesta tecnologia, forças eletrostáticas são usadas para pegar objetos que são delicados demais para que as forças de atrito funcionem. Assim como esfregar um balão no cabelo cria atração eletrostática, essa tecnologia pode ser usada para agarrar qualquer objeto. A equipe do SRI o usou em robôs que saltam paredes que trabalham até mesmo em superfícies úmidas ou ásperas.
Tecnologia eletrolaminada

Tecnologia FitSocket do MIT para membros protéticos (imagem cortesia: risosquid)
Ele pode fazer uma mudança de material de macio para duro, sob demanda e também sem adicionar volume, massa ou potência significativa aos materiais. A tecnologia utiliza polímeros flexíveis leves e de baixo custo que auxiliam na grande variação de rigidez e alongamento com reação rápida.
Os eletrolaminados foram equipados com a tecnologia FitSocket do MIT para membros protéticos. As tiras feitas de materiais eletrolaminados conectam o corpo humano aos membros protéticos. Quando os membros estão em movimento, as tiras ficam rígidas, enquanto ficam macias e flexíveis quando os membros estão em repouso.
Alguns projetos famosos de Soft Robotics
Octobô

Octobot: o primeiro robô macio totalmente autônomo do mundo (imagem cortesia: bbc)
Uma equipe de pesquisadores da Universidade de Harvard desenvolveu o primeiro robô totalmente macio e autônomo do mundo, chamado Octobot. Como o nome sugere, o robô é inspirado na estrutura de um polvo, que é forte mesmo sem esqueleto interno. Ele foi construído utilizando uma combinação de impressão 3D incorporada, moldagem e litografia suave.
Na ausência de componentes rígidos, o Octobot utiliza mecanismo pneumático e é movido a gás sob pressão. Uma reação química dentro do bot transforma o combustível líquido em gás que flui para seus braços, inflando-os como um balão. Ele também contém um circuito lógico que direciona o combustível de forma autônoma, controlando assim a reação.
Microrobô Caterpillar

Microrobô Caterpillar (imagem cortesia: Popular Science)
Pesquisadores da Universidade de Varsóvia desenvolveram um microrobô de inspiração biológica que não só se parece exatamente com uma lagarta, mas também imita seus movimentos e características em escala natural. O robô macio de 15 mm pode viajar em superfícies planas, subir encostas, passar por fendas estreitas e até transportar cargas.
Seu corpo é feito de uma faixa de elastômero sensível à luz com alinhamento molecular padronizado. Ele controla a deformação de deslocamento e pode empurrar objetos tão pesados quanto dez vezes sua própria massa. O robô tem um imenso potencial para aplicações futuras, especialmente em ambientes desafiadores.
Exo-Luva Poli

Exo-Glove Poly (imagem cortesia: youtube)
O professor associado Kyu-Jin Cho, da Universidade Nacional de Seul, juntamente com sua equipe, desenvolveu um dispositivo que fica entre um dispositivo vestível e um membro protético. É um dispositivo simples para aumentar a preensão que se prende às mãos com a ajuda de ímãs e fivelas e auxilia na movimentação das mãos e dos dedos. A luva é à prova d'água, fácil de usar e funciona com atuadores e fios simples. Esses fios vão de duas figuras até o braço e finalmente alcançam o motor de atuação, assim como os tendões de nossas mãos passam pelo pulso. Uma vez pressionado o botão, ele fecha a alça. É uma bênção para quem tem mãos paralisadas ser independente e retomar o controle.
SNUMAX

SNUMAX: Soft Robot multifuncional (imagem cortesia: youtube)
SNUMAX é um robô macio multifuncional desenvolvido em conjunto por três entidades – Laboratório de Biorobótica, Escola de Engenharia Mecânica e Aeroespacial e Universidade Nacional de Seul. O robô ganhou o primeiro prêmio no primeiro RoboSoft Grand Challenge. Possui rodas de origami transformáveis que podem mudar de tamanho e formato dependendo da situação. As rodas encolhem ao se mover por uma passagem estreita e aumentam ao subir escadas ou passar por superfícies ásperas.
Ele também contém um manipulador macio na forma de um corpo contínuo à base de polímero, permitindo movimentos altamente flexíveis e seguros. Além disso, existe uma pinça adaptativa que funciona através de um mecanismo de posicionamento adaptativo com almofada de fricção especialmente projetada, permitindo fácil aderência de objetos arbitrários.
Conclusão
Estes são apenas alguns dos avanços que foram feitos até agora no campo da robótica suave. Como o conceito é relativamente novo em comparação com a robótica convencional, ainda não testemunhamos todo o potencial dos robôs leves. Acredita-se que nos próximos anos a robótica leve não será mais restrita como um sub-ramo; em vez disso, definiria a própria robótica.
No entanto, isso não degrada necessariamente a posição atual da robótica pesada. Muitos argumentam que robôs rígidos e flexíveis poderiam coexistir dependendo das aplicações. Por exemplo, as fábricas ainda precisam de robôs duros e robustos para trabalhar com maquinaria pesada, mas quando se trata de operações de resgate, precisamos de algo mais suave e flexível para interagir com os humanos.
O ritmo com que as coisas estão se processando não está longe, quando teríamos robôs sensatos o suficiente para retrair ou mudar sua forma com antecedência quando estiverem prestes a atingir um humano antes de causar qualquer possível estrago.
Você pode ler nosso Blogue e Artigo seção para mais tópicos sobre engenharia eletrônica, indústria e tecnologia.
(tagsParaTraduzir)pic