O artigo discute o projeto de um controlador de ângulo de servo motor usando o IC NE555. O servo motor usado aqui para um experimento é um micro servo motor de 11 gramas com as seguintes especificações.
- Faixa de rotação 160ó
- Tensão operacional 8 – 6 V
- Velocidade operacional 500 graus/seg a 4,8 V ou 600 graus/seg a 6 V
- Torque de parada 8 KG/CM OU 2,4 KG/CM
- Largura de pulso 550 us (0ó) a 2,2 ms (160ó)
- Frequência de repetição de pulso (PRF) 50 Hz
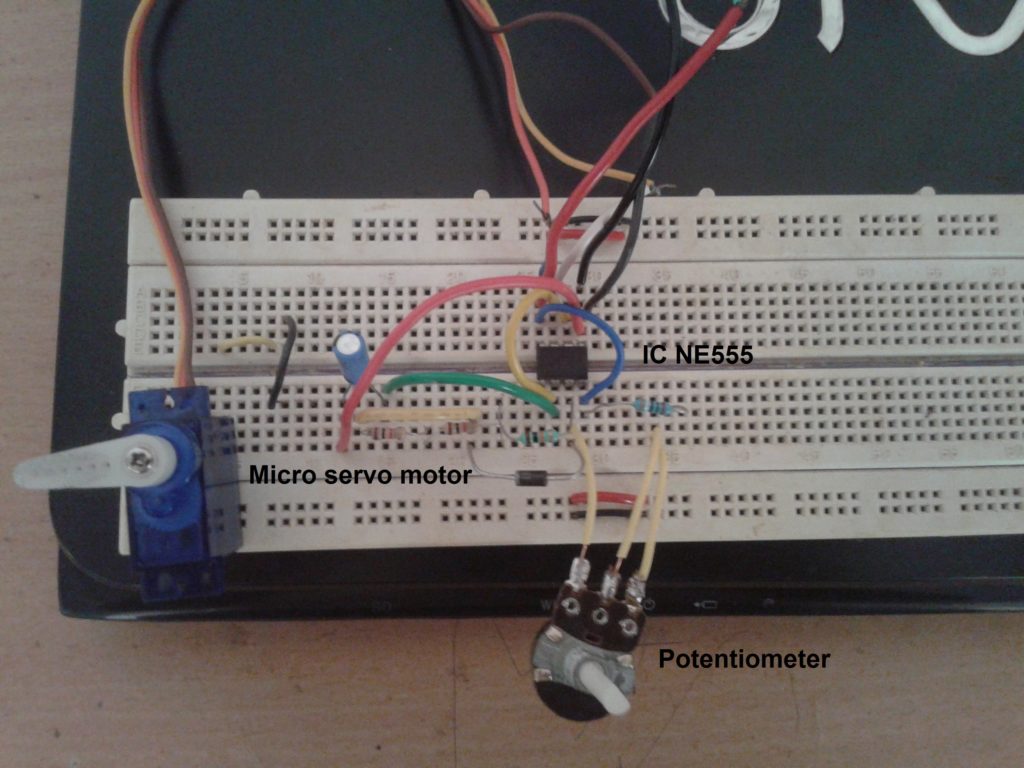
O servo motor sempre possui três terminais, um para tensão +Ve, outro para tensão –Ve e o terceiro para sinal de entrada PWM. Além disso, esses três terminais são codificados por cores. Na maioria dos motores, o fio vermelho é para entrada de tensão +Ve, o fio marrom ou laranja é para entrada de tensão –Ve e o fio amarelo ou verde é para entrada de sinal PWM.
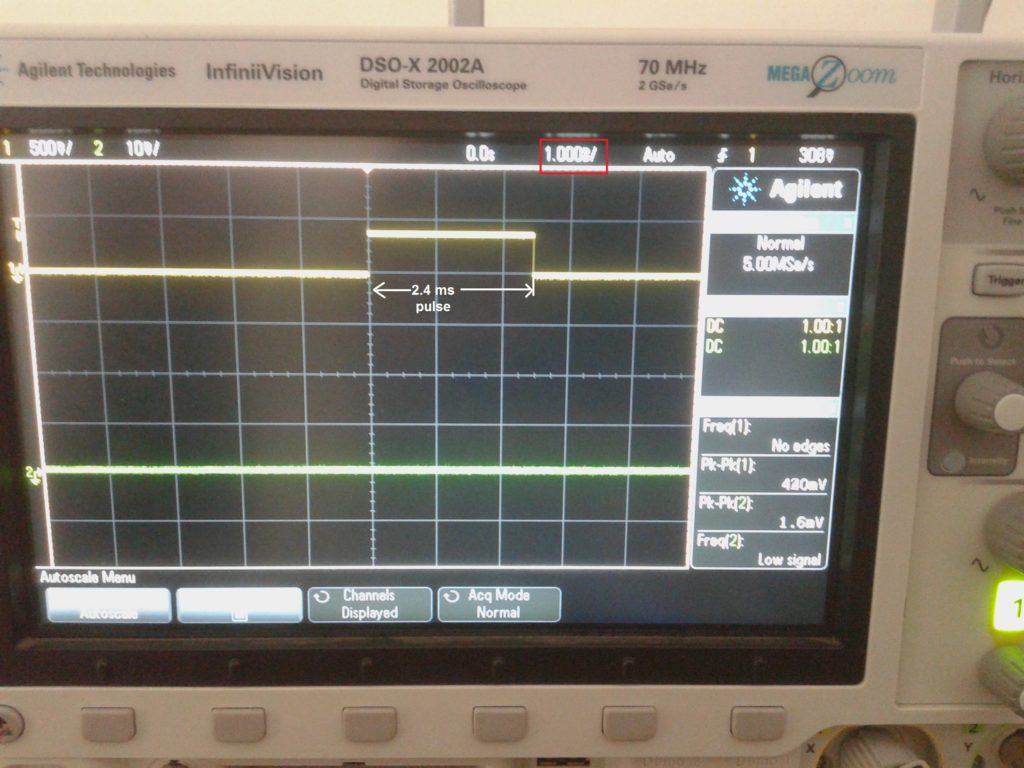
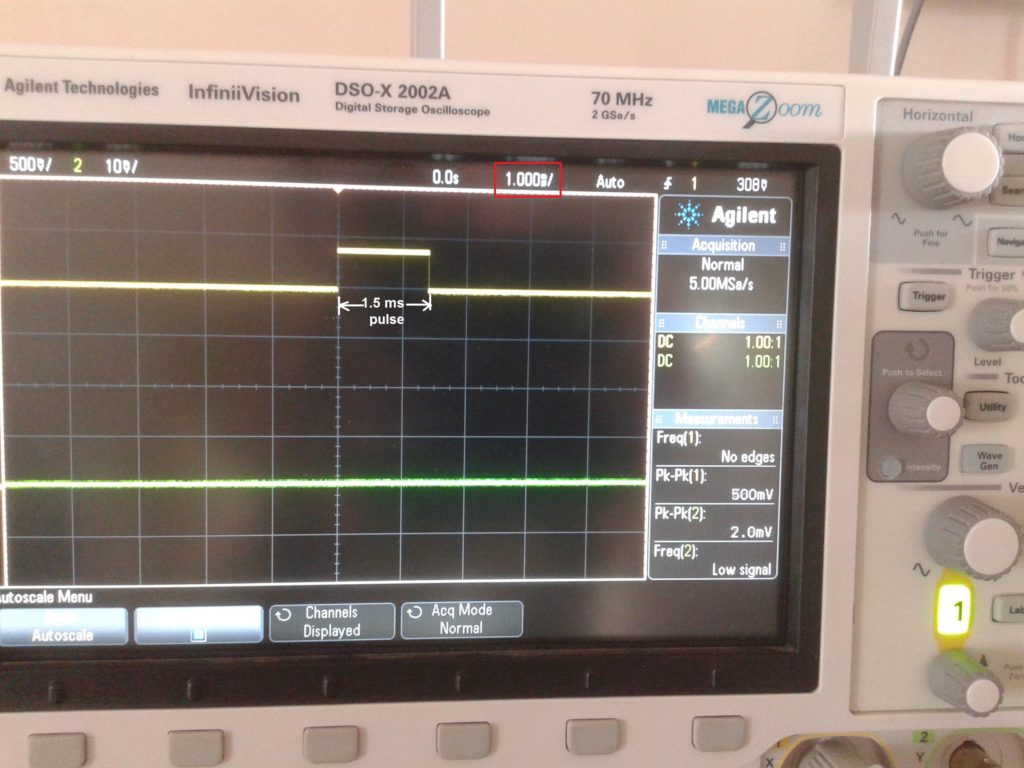
O motor é alimentado através de fios +Ve e –Ve conectando o fio +Ve com 5 a 6 V e o fio –Ve com terra. A entrada PWM é o sinal real que gira o motor no ângulo exato. Como a largura do pulso de entrada varia de 500 us a 2.200 us (2,2 ms), o motor gira de 0ó para 160ó. Além disso, o pulso deve ser aplicado a uma taxa de 50 Hz, ou seja, a cada 20 ms. À medida que a largura do pulso aumenta continuamente de 500 us para 2.200 us, o ângulo do motor aumenta de 0ó para 160ó e vice versa.
Mas como sabemos, o IC NE555 também é amplamente utilizado para gerar sinais PWM. Portanto, para controlar com precisão o ângulo do servo motor e girá-lo em um ângulo exato, é necessário aplicar um sinal PWM preciso, o que é possível com um microcontrolador. Aqui ilustramos como um controlador de ângulo de servo motor simples pode ser construído usando o IC NE555.
O IC NE555 deve ser configurado em modo astável para gerar pulsos contínuos, e também, seu tempo ON deve ser significativamente menor comparado ao tempo OFF. Veja a figura abaixo para entender melhor.
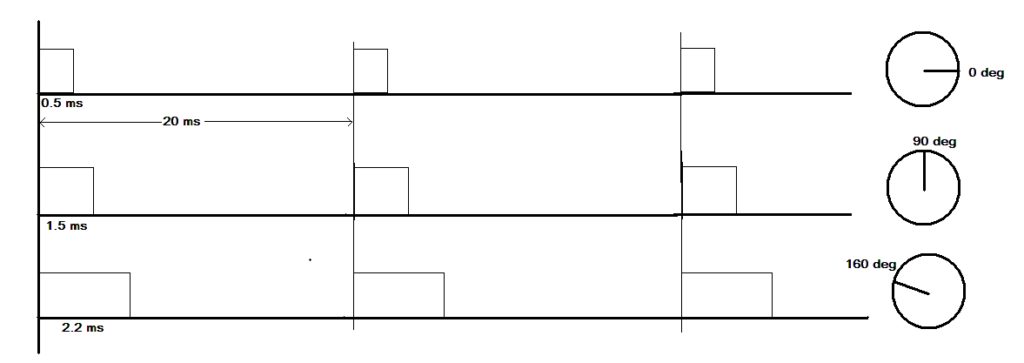
Para gerar tal forma de onda, precisamos da seguinte configuração astável do IC NE555.
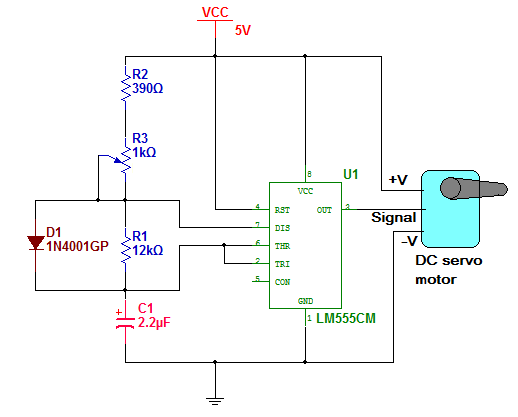
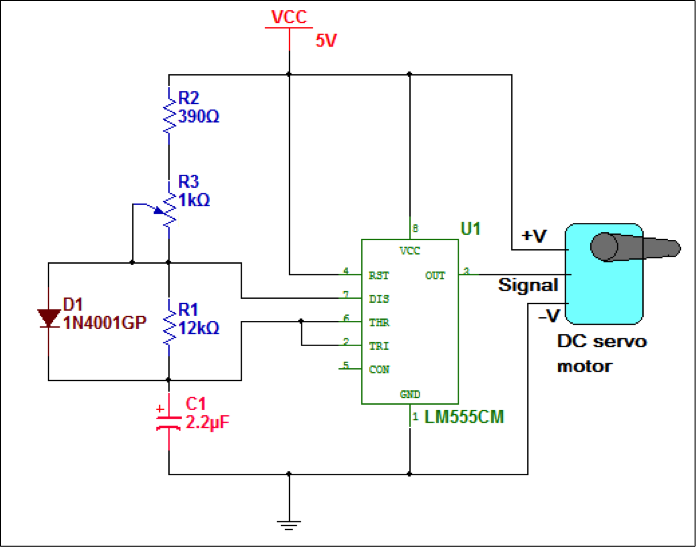
Diagrama de circuito
A figura mostra que o IC NE555 está conectado em modo astável com resistores R1, R2 e capacitor C1. Há uma adição de um diodo conectado em R1 entre os terminais 7 e 6, desviando R1 durante o carregamento de C1. A saída do chip é conectada à entrada do sinal PWM do servo motor. O circuito recebe alimentação de 5 V.
Projeto de circuito
Neste circuito o valor de R1 e C1 é fixo, mas o valor de R2 deve ser variável para variar a largura do pulso. Portanto, para projetar o circuito para gerar a onda PWM necessária, temos que descobrir os valores de R1, R2 e C1. Então vamos começar.
Ttotal = TONELADA -TOFF
TOFF = Ttotal -TON
= 20 – 2,2
= 17,8
≈ 18ms
Agora, a equação para Toff é
TOFF = 0,69×R1×C1
Vamos assumir C1 como 2,2 uF. Substituindo valores
18×10-3 = 0,69×R1×2,2×10-6
Isso nos dará R1 como
R1 = 11,85 KΩ
Então, considere R1 como 12 KΩ. Isso nos dá dois valores para projeto de circuito
R1 = 12 KΩ e C1 = 2,2 uF
O tempo mínimo de ativação é de 550 nós. É mínimo quando R2 é mínimo. A equação do tempo ON é a mesma
TONELADA = 0,69×R2min×C1
Conhecemos os valores de TON e C1, então,
550×10-6 = 0,69×R2min×2,2×10-6
Isso dá R2min como R2min = 362Ω
O valor real mais próximo de R2 é 390 Ω. Portanto, R2 pode ser 390 Ω.
Agora, vá para o tempo máximo de ativação que é 2.200 nós. Obviamente será quando R2 for máximo.
Então, TONELADAS = 0,69×R2max×C12200×10-6 = 0,69×R2max×2,2×10-6
Isso dá R2max como
R2máx = 1450Ω = 1,4 K ≈ 1K + 390 Ω
Portanto, se escolhermos R2 como uma resistência fixa de 390 Ω e um potenciômetro de 1 K Ω, o projeto do circuito poderá ser perfeito.
Aqui está o snap do circuito construído na placa de ensaio
Operação do circuito
Quando o circuito recebe uma alimentação de 5 V, ele gera uma onda PWM a 50 Hz. Quando esta onda é dada ao servo motor, ele irá girar em um ângulo específico. À medida que a largura do pulso aumenta, o ângulo do motor aumenta e vice-versa. Aqui estão alguns dos instantâneos da saída do circuito no DSO.
link do vídeo do youtube do projeto