Quando você pensa em robôs, você pode imaginar aqueles em filmes de ficção científica como Exterminador do Futuro, Jornada nas Estrelas, Guerra das Estrelas, etc. No entanto, os robôs industriais assumem muitas formas e formas, incluindo rovers, drones, braços cirúrgicos, humanóides e até veículos. Existem vários tipos de robôs usados em indústrias como manufatura, aeroespacial, automotiva, busca e salvamento, médica e outras.
Essas máquinas mecânicas tornaram-se capazes de mover e executar tarefas bastante avançadas. Mas a robótica não se limita apenas ao estado sólido da matéria. Neste artigo, discutiremos robôs que são menos comuns e muito mais exclusivos. Eles podem deformar-se, esticar-se e adaptar-se ao seu ambiente. Esses robôs que transformam formas são chamados de robôs suaves.
O que são robôs leves?
Os robôs macios são diferentes dos robôs convencionais, normalmente feitos de metal e plástico, incorporando, em vez disso, materiais delicados e flexíveis. Eles frequentemente imitam as características de criaturas de corpo mole da natureza, imitando a biomecânica de vermes, polvos ou músculos humanos. Como resultado, eles podem deformar-se, esticar-se e adaptar-se ao seu ambiente de uma forma que os robôs convencionais não conseguem.
Os robôs flexíveis podem se espremer em espaços apertados, caber em superfícies atípicas e interagir de forma mais segura com os humanos. Eles são amplamente utilizados para fins médicos, exploração subaquática, interação humano-robô e operações de busca e salvamento.
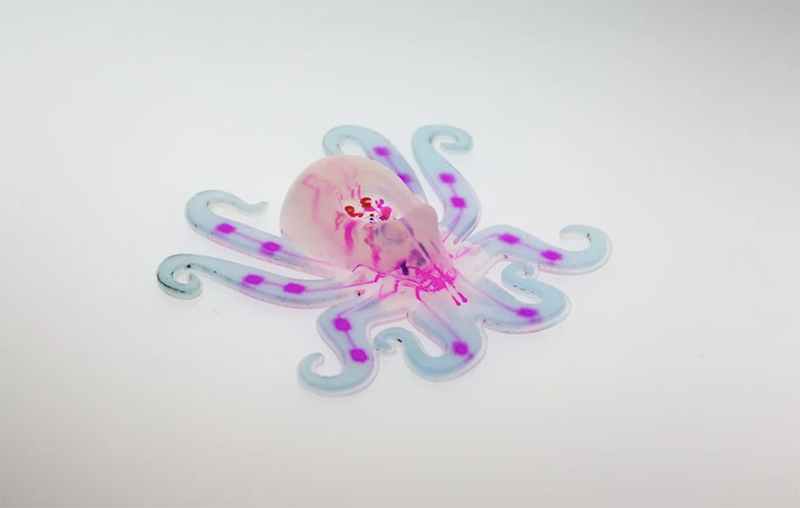
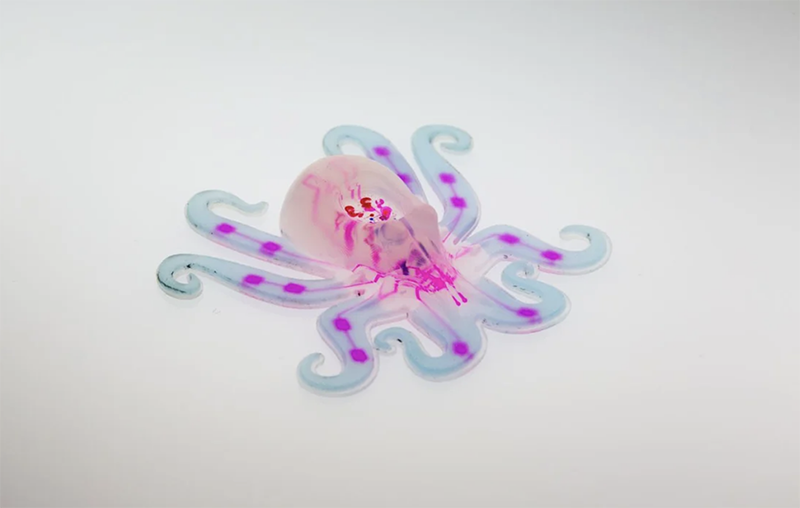
O primeiro robô macio totalmente autônomo foi o “Octobot”, projetado por pesquisadores da Universidade de Harvard em 2016. Ele é impresso em 3D, com um corpo baseado em elastômero que usa peróxido de hidrogênio como combustível. Curiosamente, o Octobot não usa componentes eletrônicos ou rígidos.
Como a robótica suave difere das convencionais?
A robótica suave introduz uma mudança de paradigma no campo, transcendendo as fronteiras convencionais da eletrônica, física e design mecânico. Ele marca a intersecção da robótica e da química, oferecendo um afastamento da rigidez associada aos sistemas robóticos típicos. E começa com o material.
Os robôs flexíveis usam materiais compatíveis, como polímeros e elastômeros, em sua construção, em vez de sólidos como metal e plástico. Seu design prioriza flexibilidade, deformabilidade e adaptabilidade. Esse afastamento das estruturas rígidas permite que os robôs flexíveis se deformem, mudem de forma e se adaptem a vários ambientes. A capacidade de mudança é uma característica definidora dos robôs flexíveis, permitindo-lhes navegar através de ambientes complexos ou confinados, ou espaços ou superfícies irregulares, com maior facilidade do que os seus homólogos rígidos.
A maleabilidade destas máquinas únicas abre novas possibilidades para aplicações em vários campos, prometendo avanços na robótica que vão além dos limites dos princípios de design convencionais.
Com as suas estruturas rígidas, os robôs mecânicos não conseguem imitar verdadeiramente os seus homólogos bioinspirados. A construção normalmente envolve usinagem e soldagem para montar componentes mecânicos complexos, contando com motores, engrenagens e elos para manobrabilidade.
Em contraste, os robôs moles imitam de perto os organismos de corpo mole que os inspiram, replicando funcionalidades mais eficientes e biomiméticas. Eles são projetados usando impressão 3D, litografia suave e técnicas de integração têxtil.
Robôs macios frequentemente empregam sistemas pneumáticos ou hidráulicos, ligas com memória de forma e outros mecanismos de movimento fluidos e adaptativos compatíveis. Diferentemente de robôs convencionais que usam rodas, esteiras ou pernas para locomoção, robôs macios se movem por meio de rastejamento, movimento peristáltico, ondulação ou outros métodos inspirados na natureza em seu ambiente circundante.
Além disso, os robôs leves são inerentemente projetados para interação humana e apresentam risco mínimo de ferimentos em caso de contato acidental, garantindo uma coexistência segura com humanos. Raramente existem preocupações de segurança com robôs convencionais operando perto de humanos, levando à integração de sensores para prevenção de acidentes.
Esta mudança de paradigma no design e nos materiais anuncia uma nova era da robótica com maior segurança e capacidades biomiméticas.
Os robôs convencionais são adequados para fabricação, linhas de montagem e operações pesadas que exigem precisão, repetibilidade e resistência. Os robôs soft são ideais para aplicações que envolvem interações com objetos delicados, navegação por ambientes complexos e tarefas onde a adaptabilidade é crucial. Tais aplicações são frequentemente encontradas em medicina, robótica colaborativa e operações de busca e salvamento.
Robôs suaves populares
O primeiro robô macio foi construído em 2016. Desde então, vários robôs macios foram projetados e surgiram à medida que o campo continua avançando. Aqui estão alguns dos robôs soft populares que recentemente ganharam atenção.
Octobô: o primeiro robô de corpo mole, desenvolvido na Universidade de Harvard em 2016, inspirado em um polvo. Opera de forma autônoma, usando uma combinação de litografia suave, impressão 3D e microfluídica incorporada.
mGrip: uma pinça robótica macia e versátil desenvolvida pela Soft Robotics, disponível em vários designs inspirados na natureza — incluindo aqueles inspirados na mão humana ou outros animais. Essas pinças são apropriadas para objetos delicados e de formato irregular porque usam materiais complacentes que se adaptam ao formato do objeto. Elas são usadas para agarrar objetos e diversos ambientes são usados para manipulação robótica.
Exosuit robótico suave do Wyss Institute: O Instituto Wyss de Engenharia Biologicamente Inspirada da Universidade de Harvard desenvolveu exosuits macios, dispositivos vestíveis projetados para auxiliar e aumentar o movimento humano. Esses robôs são construídos com materiais têxteis que fornecem suporte e aprimoram a biomecânica natural do usuário. Eles são usados em ambientes de reabilitação para ajudar indivíduos com dificuldades de mobilidade ou para melhorar o desempenho de indivíduos saudáveis.
Arraia robótica macia: replicam o andar de natação de arraias reais. Elas são usadas para exploração subaquática e são impulsionadas por atuadores que lembram músculos.
Cateteres robóticos macios: usado em tratamentos médicos minimamente invasivos. Comparados aos cateteres rígidos convencionais, eles são mais flexíveis e podem passar por estruturas anatômicas complexas com menos chance de causar lesões nos tecidos. O robô cirúrgico STIFF-FLOP (manipulador flexível e aprendível controlável pela rigidez para operações cirúrgicas) é um exemplo.
RoboSoftWorm: Inspirados no movimento dos vermes, os robôs são normalmente usados para operações de busca e salvamento em espaços confinados. O RoboSoftWorm usa movimento peristáltico para se locomover.
Kit de ferramentas de robótica suave: um recurso de código aberto desenvolvido pelo Harvard Biodesign Lab que fornece informações, designs e ferramentas para ajudar pesquisadores e engenheiros a criar seus sistemas robóticos leves.
Robôs macios biohíbridos: Muitas equipes de pesquisa estão desenvolvendo robôs moles biohíbridos, que combinam células ou tecidos biológicos. Para realizar tais tarefas, esses robôs podem utilizar componentes orgânicos ou células musculares.
Próteses robóticas suaves: dispositivos protéticos feitos de materiais macios, melhorando o conforto e a flexibilidade dos usuários. Empresas como a Soft Robotics e outras estão trabalhando na criação de soluções protéticas adaptáveis e confortáveis.
Robô macio para cirurgia endoscópica: desenvolvido para aplicações em cirurgia endoscópica, permitindo procedimentos mais flexíveis e menos invasivos.
Garras robóticas macias para agricultura: projetado para permitir que robôs manuseiem e colham frutas sem prejudicar a colheita. Os sistemas de colheita automatizada podem beneficiar disto.
Como os robôs leves são construídos?
A construção de um robô macio começa com a seleção de materiais, normalmente substâncias macias e flexíveis como elastômeros, polímeros e silicone. Esses materiais permitem que o robô se deforme e flexione, emulando as características de organismos de corpo mole.
A próxima etapa envolve projetar a forma, estrutura e funcionalidade do robô. Este processo deve considerar a aplicação pretendida, o método de movimento e as tarefas que se espera que o robô execute. O software de design auxiliado por computador (CAD) modela o robô flexível e as ferramentas de simulação analisam o comportamento e o desempenho.
Uma vez finalizado o modelo, são utilizadas técnicas de fabricação especializadas, como litografia suave, impressão 3D ou integração têxtil. A litografia suave envolve a fundição de elastômeros de silicone em moldes para criar estruturas macias e flexíveis. Alguns robôs macios incorporam tecidos ou materiais semelhantes a têxteis para aumentar a flexibilidade e introduzir novos recursos. Técnicas de fabricação aditiva, como impressão 3D com materiais flexíveis, facilitam a criação de componentes flexíveis de robôs complexos e personalizados.
Sensores, atuadores e outros componentes são integrados ao robô flexível durante a fabricação. Dependendo dos requisitos do projeto, esses robôs empregam atuadores pneumáticos, hidráulicos ou elétricos. Muitos utilizam sistemas pneumáticos ou hidráulicos para atuar e regular movimentos, apresentando tubos infláveis integrados ou câmaras cheias de líquido ou ar para obter deformações controladas. Este processo abrangente produz robôs flexíveis com formas e funcionalidades personalizadas para diversas aplicações.
Algoritmos de controle governam os movimentos e respostas do robô, gerenciando vários aspectos como ajuste de pressão em sistemas pneumáticos, coordenação da ativação do atuador e resposta a entradas sensoriais. Testes rigorosos em um ambiente controlado avaliam o desempenho real do robô, com iterações de projeto e fabricação baseadas nos resultados dos testes para aprimorar a funcionalidade, a eficiência e a confiabilidade.
Dependendo do projeto, a fonte de energia do robô pode vir de baterias, fontes externas ou métodos de coleta de energia.
A personalização é um aspecto crítico da adaptação de robôs flexíveis às aplicações pretendidas. Depois que um projeto é exaustivamente testado e finalizado, a montagem garante conexões adequadas e integração perfeita de sensores, atuadores e sistemas de controle. Este processo meticuloso resulta em um robô flexível totalmente otimizado e pronto para as tarefas designadas.
Por que a robótica suave é um campo em crescimento?
Os robôs leves representam um avanço recente no campo da robótica, oferecendo inovação diferente das abordagens convencionais. Esta tecnologia emergente visa revolucionar a robótica, priorizando segurança, flexibilidade, adaptabilidade e acessibilidade.
Os robôs flexíveis não têm restrições quanto à forma e função rígidas dos robôs típicos, permitindo a implantação em áreas novas e inacessíveis. Os robôs leves marcam uma mudança significativa no design baseado na química e na biometria, em vez da eletrônica e da mecânica. Em alguns casos, os robôs leves funcionam sem eletrônica e não estão limitados à cinemática ou a fontes de energia específicas. Por exemplo, o Octobot obtém energia de reações químicas. Além disso, graças à sua flexibilidade e adaptabilidade, são promissores para o desenvolvimento de robótica vestível.
A robótica suave se destaca na navegação em ambientes complexos e dinâmicos, ultrapassando os limites do que antes era considerado impossível.
Formulários
Embora seja um desenvolvimento relativamente recente, os soft robots são utilizados em diversas aplicações devido à sua flexibilidade e adaptabilidade. Aqui estão alguns exemplos.
Robótica médica: útil em procedimentos minimamente invasivos, navegando por tecidos delicados e melhorando a precisão cirúrgica. Dispositivos robóticos leves são adequados para explorar e executar tarefas no corpo humano, como exames endoscópicos e administração direcionada de medicamentos.
Colaboração humano-robô: muitas vezes ideais para atividades colaborativas em espaços de trabalho compartilhados porque esses robôs inovadores podem interagir com segurança e sem riscos mínimos.
Próteses: esses dispositivos são feitos de materiais macios que se ajustam mais confortavelmente do que as próteses típicas, assemelhando-se à flexibilidade e amplitude de movimento de membros reais.
Vestuário: exoesqueletos robóticos macios podem auxiliar em tarefas físicas, muitas vezes aumentando a velocidade e a resistência, e muito mais.
Reabilitação: dispositivos médicos avançados e exosuits flexíveis podem ajudar pessoas na recuperação de lesões ou com movimentos limitados. Eles permitem uma mobilidade adaptativa e natural.
Pinças macias para fabricação: essas pinças são usadas para manuseio delicado de produtos em aplicações industriais. São ideais para tarefas que exigem um toque delicado e podem imitar os contornos de diversos objetos.
Robótica agrícola: utilizado para realizar atividades como selecionar e manusear frutas frágeis sem danificá-las.
Robótica bioinspirada: pode imitar os movimentos e funções de criaturas de corpo mole, seguindo sugestões da natureza. Isto inclui dispositivos robóticos projetados para se parecerem com vermes, polvos e outros animais.
Busca e resgate: extremamente útil para missões de busca e salvamento em situações perigosas ou difíceis de alcançar. A destreza desses robôs macios permite que eles manobrem em torno de obstáculos e áreas confinadas.
Exploração subaquática: Como os robôs leves são flexíveis e adaptáveis, eles são empregados em pesquisas subaquáticas. Eles são mais hábeis em navegar em terrenos subaquáticos do que seus equivalentes rígidos.
Exploração espacial: eles podem atravessar lugares pequenos e se adaptar a terrenos variados, de modo que os robôs leves têm usos potenciais na exploração espacial.
Educação e pesquisa: facilitar a exploração de novos materiais, métodos de fabricação e esquemas de controle por cientistas e engenheiros que atuam como plataformas de pesquisa e auxílios instrucionais.







