Aqui está um aplicativo muito bom e interessante para controlar um modelo de lançador de mísseis através de um smartphone usando um aplicativo Android Bluetooth. O modelo do lançador de mísseis é construído com dois servomotores. Um servo motor (motor azimutal) gira o lançador de mísseis para a esquerda e para a direita, enquanto outro servo motor (motor de elevação) move o lançador de mísseis para cima e para baixo. Esses dois servomotores são controlados por meio de um aplicativo Android Bluetooth em um smartphone. O usuário pressiona botões no aplicativo para mover o lançador de mísseis para cima/para baixo ou para virar à esquerda/direita e o aplicativo enviará comandos através do Bluetooth embutido no telefone. O projeto é construído utilizando módulo Bluetooth e placa Arduino NANO que receberá comandos de smartphones e gira ambos os servo motores para posicionar o lançador de mísseis conforme comandos do usuário.
O aplicativo demonstra o controle de dois servo motores utilizando um smartphone com auxílio do módulo Bluetooth e Arduino NANO. É um projeto muito simples, fácil de construir, mas ainda assim muito interessante. Requer apenas dois a três componentes e poucas conexões e pronto!!!
Então vamos começar a construir o projeto. Primeiro vamos começar com um diagrama esquemático, suas conexões e seguido de seu funcionamento.
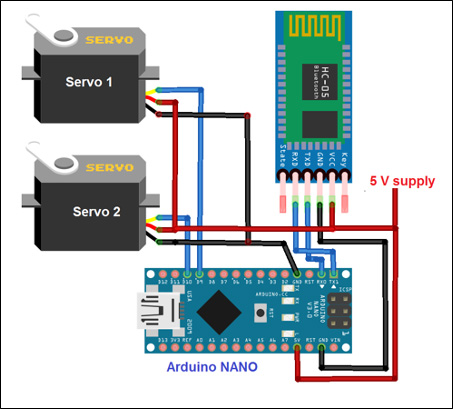
Diagrama esquemático
 Descrição do circuito:
Descrição do circuito:
Conforme mostrado na figura, existem apenas 4 componentes no circuito, um módulo Bluetooth HC-05, uma placa Arduino NANO e 2 servo motores
- O HC-05 possui 4 pinos para interface (1) Vcc (2) Gnd (3) Tx e (4) Rx. Seus pinos Vcc e Gnd são conectados aos pinos 5V e Gnd da placa Arduino, respectivamente. Outros dois pinos Tx e Rx estão conectados aos pinos Rx (D1) e Tx (D0) do Arduino, respectivamente.
- Ambos os servo motores possuem 3 fios para interface (1) Vcc (2) Gnd e (3) sinal. Novamente, os pinos Vcc e Gnd estão conectados aos pinos 5V e Gnd da placa Arduino, respectivamente.
- A entrada de sinal do servo motor 1 é conectada ao pino de saída PWM D9 da placa Arduino e a entrada de sinal do servo motor 2 é conectada ao pino de saída PWM D10 da placa Arduino
Operação do circuito
O circuito é energizado fornecendo 5 V via USB ou através de uma fonte de alimentação externa de 5 V. Quando a alimentação é fornecida, ambos os motores atingem 0ó e o lançador de mísseis aponta para sua posição inicial.
Agora, para girar o lançador de mísseis na direção azimutal (horizontal) ou na direção de elevação (vertical), é necessário enviar comandos de seu smartphone usando o aplicativo Android Bluetooth
- Primeiramente é necessário abrir o aplicativo Android no smartphone. Este aplicativo irá pesquisar e emparelhar com o módulo HC05 (para emparelhar pela primeira vez, é necessário inserir uma senha Bluetooth para o módulo HC05, que é por padrão 1234)k
- Então, alguém pode enviar comandos diferentes de um aplicativo que é transmitido através de um telefone Bluetooth integrado
- Quatro comandos diferentes são definidos no programa para girar o lançador de mísseis no sentido horário, anti-horário, mover para cima e para baixo
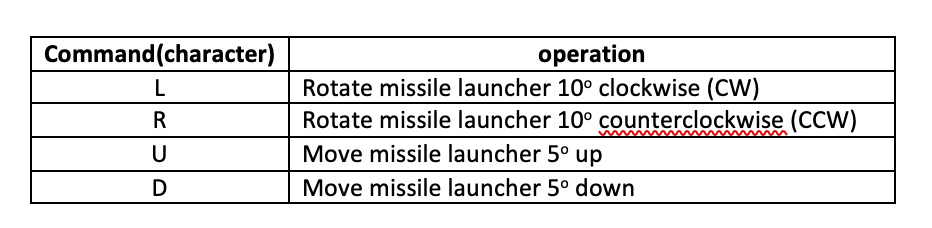
- O servo motor 2 é um motor de elevação. Ele move o lançador de mísseis para cima e para baixo girando o motor CW ou CCW. Move o lançador de mísseis de 0ó até o máximo 45ó
- Quando o comando é enviado do telefone, ele é recebido pelo módulo HC-05. O módulo dá este comando ao microcontrolador Arduino através de comunicação serial
- O microcontrolador Arduino obtém este comando e o compara com todos os 4 comandos definidos. De acordo com a correspondência encontrada, ele girará o servo motor 1 ou o servo motor 2 no sentido horário ou anti-horário e moverá o lançador de mísseis para cima/para baixo ou girará no sentido horário ou anti-horário
Este funcionamento e operação do circuito seguem o programa embarcado no microcontrolador Arduino NANO ATMega328. Então, vamos ver o programa de software para este sistema. O servo motor 1 é o motor azimutal. Ele vira o lançador de mísseis para a ESQUERDA ou DIREITA girando o motor CW ou CCW. Ele pode girar o lançador de mísseis de 0ó até o máximo 180ó.
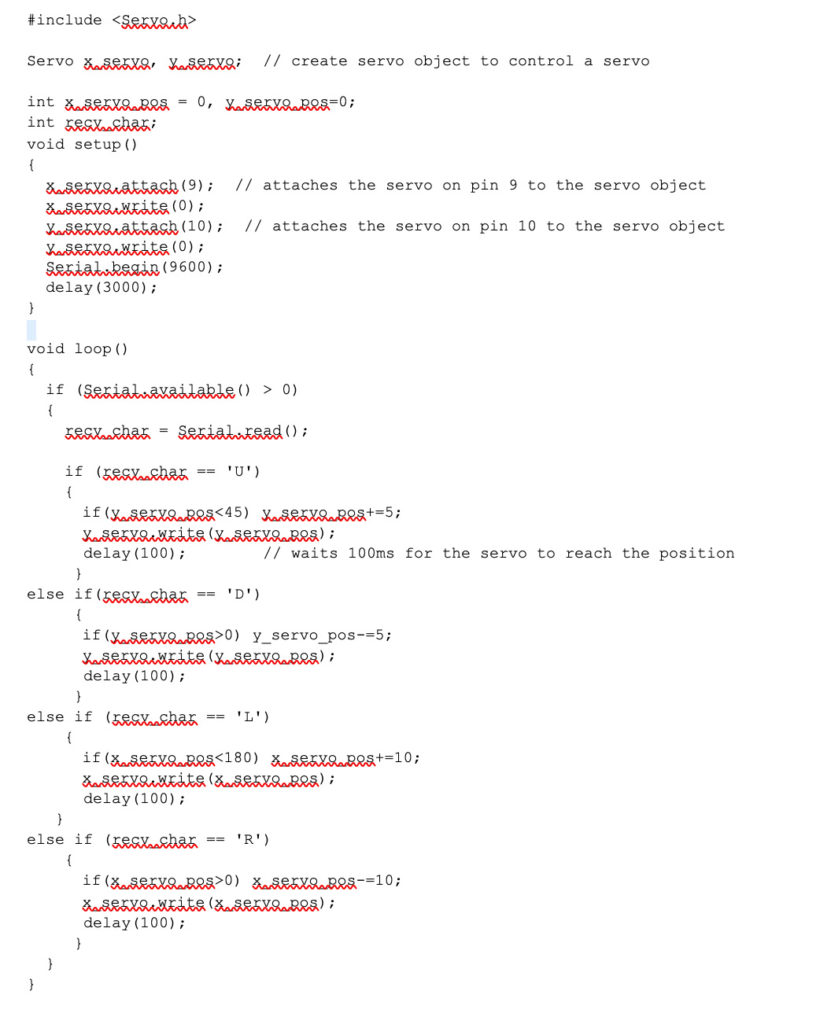
Programa de software
O programa é escrito em linguagem C/C++ usando a ferramenta de software Arduino IDE. Também é compilado e baixado na memória interna (FLASH) do microcontrolador ATMega328 utilizando este mesmo software. Aqui está o código do programa.