Resumo
Objetivo do projeto:
O principal objetivo deste projeto é proporcionar mais segurança em áreas restritas.
Aplicação geral do circuito:
Bancos:
Nos bancos é utilizado principalmente em vestiários para maior segurança. Se algum movimento for detectado nos vestiários, as fotos serão capturadas automaticamente.
Demonstre seu funcionamento:
PIR é um sensor usado para detectar qualquer movimento. Se algum movimento for detectado pelo sensor PIR, ele enviará uma mensagem de ativação para o Raspberry Pi. Em seguida, o Raspberry Pi ligará a câmera e a câmera pi capturará a imagem.
Descrição:-
Bloquear diagrama:

Fig. 1: Diagrama de blocos do alarme de intrusão baseado em Raspberry Pi
Ethernet :

Fig. 2: Imagem mostrando o cabo Ethernet conectando o PC e o Raspberry Pi
É uma Família de redes de computadores tecnologias para redes locais (LAN) e redes de área metropolitana (HOMEM). Foi introduzido comercialmente em 1980 e padronizado pela primeira vez em 1983 como IEEE 802.3e desde então foi refinado para suportar maiores taxas de bits e distâncias de link mais longas. Com o tempo, a Ethernet substituiu amplamente as tecnologias concorrentes de LAN com fio, como anel de ficha, FDDEUe ARCNET. A principal alternativa para LANs contemporâneas não é um padrão com fio, mas sim uma LAN sem fio padronizada como IEEE 802.11 e também conhecido como Wi-fi.
Os padrões Ethernet compreendem diversas variantes de fiação e sinalização da camada física OSI em uso com Ethernet. A Ethernet 10BASE5 original usava cabo coaxial como meio compartilhado. Mais tarde, os cabos coaxiais foram substituídos por pares trançados e links de fibra óptica em conjunto com hubs ou switches. Ao longo de sua história, as taxas de transferência de dados Ethernet aumentaram dos 3 megabits por segundo (Mbit/s) originais para os últimos 100 gigabits por segundo (Gbit/s), com 400 Gbit/s esperados no início de 2017.
Os sistemas que se comunicam pela Ethernet dividem um fluxo de dados em pedaços mais curtos chamados quadros. Cada quadro contém endereços de origem e destino e dados de verificação de erros para que dados danificados possam ser detectados e retransmitidos. De acordo com o modelo OSI, a Ethernet fornece serviços até e incluindo a camada de enlace de dados.
Sensor PIR: –

Figura 3: Imagem típica do sensor PIR
Um sensor PIR individual detecta alterações na quantidade de radiação infravermelha que incide sobre ele, que varia dependendo da temperatura e das características da superfície dos objetos na frente do sensor.) Quando um objeto, como um ser humano, passa na frente do fundo, como uma parede, a temperatura naquele ponto do campo de visão do sensor aumentará da temperatura ambiente para a temperatura corporal e depois voltará novamente. O sensor converte a alteração resultante na radiação infravermelha de entrada em uma alteração na tensão de saída e isso aciona a detecção. Objetos em movimento com temperatura semelhante à do fundo, mas com características de superfície diferentes, também podem ter um padrão de emissão infravermelha diferente e, portanto, às vezes, acionar o detector.
Os PIRs vêm em muitas configurações para uma ampla variedade de aplicações. Os modelos mais comuns possuem numerosas lentes Fresnel ou segmentos de espelho, um alcance efetivo de cerca de dez metros (trinta pés) e um campo de visão inferior a 180 graus. Estão disponíveis modelos com campos de visão mais amplos, incluindo 360 graus – normalmente projetados para montagem no teto. Alguns PIRs maiores são feitos com espelhos de segmento único e podem detectar mudanças na energia infravermelha a mais de trinta metros de distância do PIR. Existem também PIRs projetados com espelhos de orientação reversíveis que permitem uma cobertura ampla (110° de largura) ou uma cobertura de “cortina” muito estreita ou com segmentos selecionáveis individualmente para “moldar” a cobertura.
Raspberry Pi:-

Fig. 4: Imagem típica do Raspberry Pi 2
O Raspberry Pi é uma série de computadores de placa única do tamanho de um cartão de crédito desenvolvidos no Reino Unido pela Raspberry Pi Foundation com a intenção de promover o ensino de ciência da computação básica nas escolas.
O Raspberry Pi original é baseado no sistema Broadcom BCM2835 em um chip (SoC), que inclui um processador ARM1176JZF-S700 MHz, GPU Video Core IV e foi originalmente enviado com 256 megabytes de RAM, posteriormente atualizado (modelos B e B+) para 512 MB. O sistema possui soquetes Secure Digital (SD) (modelos A e B) ou Micro-SD (modelos A+ e B+) para mídia de inicialização e armazenamento persistente. Em 2014, a Raspberry Pi Foundation lançou o Compute Module, que empacota um BCM2835 com 512 MB de RAM e chip flash MMC em um módulo para uso como parte de sistemas embarcados.
Câmera Pi: –

Fig. 5: Imagem típica da câmera Rapsberry Pi
O módulo de câmera Raspberry Pi é um complemento personalizado para Raspberry Pi. Ele se conecta ao Raspberry Pi por meio de um dos dois pequenos soquetes na superfície superior da placa. Esta interface utiliza a interface CSI dedicada, que foi projetada especialmente para interface com câmeras. O barramento CSI é capaz de taxas de dados extremamente altas e transporta exclusivamente dados de pixel.
A placa em si é minúscula, com cerca de 25 mm x 20 mm x 9 mm. Ele também pesa pouco mais de 3g, o que o torna perfeito para dispositivos móveis ou outras aplicações onde o tamanho e o peso são importantes. Ele se conecta ao Raspberry Pi por meio de um pequeno cabo de fita. A câmera é conectada ao processador BCM2835 no Pi através do barramento CSI, um link de largura de banda mais alta que transporta dados de pixel da câmera de volta ao processador. Esse barramento viaja ao longo do cabo de fita que conecta a placa da câmera ao Pi. O próprio sensor tem uma resolução nativa de 5 megapixels e uma lente de foco fixo integrada. Em termos de imagens estáticas, a câmera é capaz de produzir imagens estáticas de 2592 x 1944 pixels e também suporta vídeo 1080p30, 720p60 e 640x480p60/90.
Funcionamento do circuito: –
Depois de instalar o sistema operacional no Raspberry pi, conecte o raspberry pi ao PC através do cabo LAN com a ajuda do software MobeXterm, temos que abrir o desktop do raspberry pi.
Antes de abrir o desktop abra MobeXterm ele consiste em SSH clique em SSH e forneça o endereço IP qual endereço IP fornecemos na instalação do SO em raspberry pi e clique nesse endereço IP e abra uma nova janela e dê o comando lxsession para abrir o desktop do raspberry pi.O desktop consiste em muitos aplicativos como jogos, IDE python e terminal raiz, etc … abra o IDE python e escreva o código para nossos requisitos e salve-o como terminal raiz pirsensor.py.open e para definir o caminho, forneça o comando cd desktop e para executar o código dê o comando sudo python3 pirsensor.py se algum movimento for detectado o sensor PIR é ativado e dará a ativação ao raspberry pi e o raspberry pi liga a câmera e captura as imagens.
Número de componentes
· Raspberry pi modelo B+ placa-1
· Câmera Pi-1
· Sensor PIR-1
Número do PIN:-
Descrição do PIN do Raspberry Pi: –

Figura 6: Diagrama de pinos do Raspberry Pi GPIO
Conecte a saída do sensor PIR da seguinte forma
PIR 1st alimentação do pino (+5v) (pino2).
PIR 2e saída de pino (GPIO16).
PI 3terceiropino terra (pino 9)
Valores de tensão de alimentação: –
· Framboesa pi – 5v
· Sensor PIR – 5v
Imagem do circuito implementado: –

Figura 7:
Protótipo de alarme de intrusão baseado em Raspberry Pi
Código-fonte do projeto
###
from time import sleep
import RPi.GPIO as GPIO
import picamera
from tkinter import *
from threading import Thread
def motion :
photo = PhotoImage(file="hero.gif")
w = Label(master, image=photo)
w.photo = photo
w.pack
mainloop
def threadings :
GPIO.setmode(GPIO.BCM)
GPIO.setup(16, GPIO.IN)
while True:
if ( GPIO.input(16) == True ):
print ("Warning - MOTION has been detected!")
with picamera.PiCamera as camera:
camera.start_preview
sleep(2)
camera.capture('/home/pi/Desktop/hero.gif')
camera.stop_preview
master = Tk
photo = PhotoImage(file="hero.gif")
w = Label(master, image=photo)
w.photo = photo
w.pack
mainloop
else:
print ("All is QUIET in RPi...")
sleep(1);
motion
while True:
t=Thread(target=threadings)
t.start
t.join
###
Diagramas de circuito
| Detecção de intrusão com raspberry pi usando câmera_Diagrama de circuito | 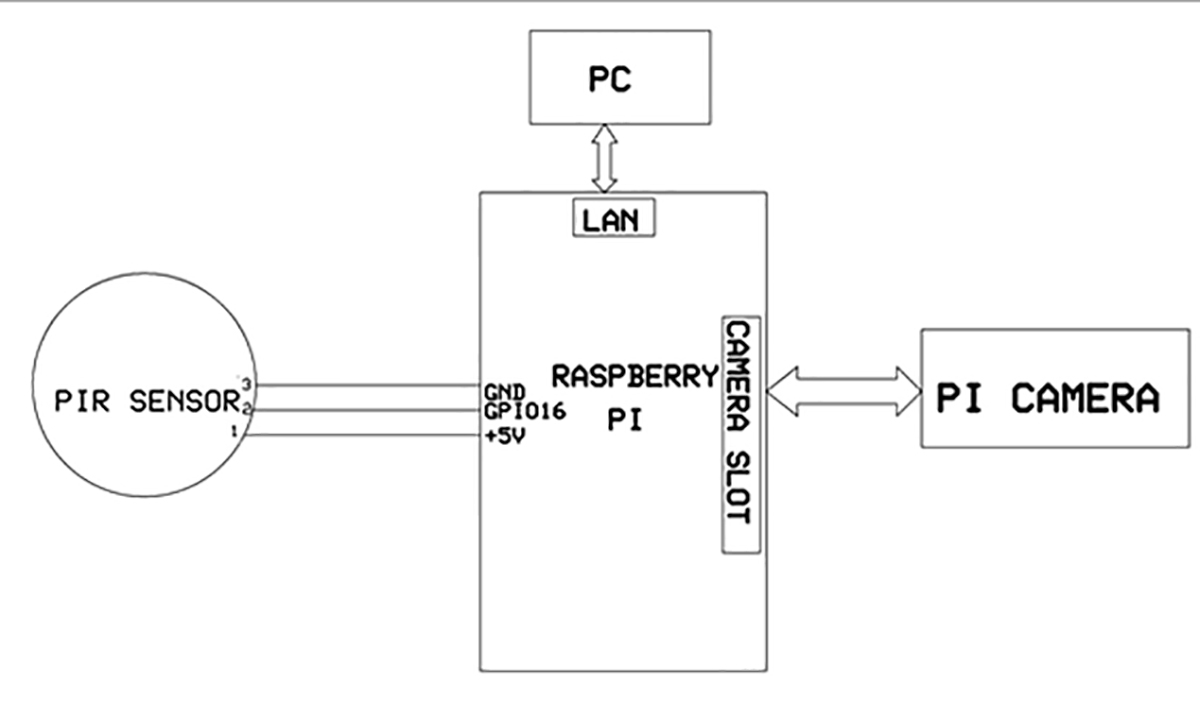 |