Já aprendemos sobre os diferentes componentes que constituem um robô industrial ou um braço robótico. Também discutimos diferentes tipos de robôs usados na indústria. Um dos termos mais importantes utilizados no contexto de robôs e seu design é grau de liberdade. Neste artigo falaremos sobre o grau de liberdade em robôs. Por que é tão importante e como é calculado.
Qual é o grau de liberdade?
O grau de liberdade é um fator extremamente importante na robótica, usado para definir as capacidades físicas de movimento de um robô. Um robô é essencialmente uma combinação de múltiplos mecanismos onde cada mecanismo é formado por um conjunto de elos e juntas. Conforme já discutido, existem diferentes tipos de juntas utilizadas na construção de um robô. As juntas dos pares inferiores mais comuns incluem a junta de revolução, a junta prismática, a junta helicoidal, a junta cilíndrica, a junta esférica e a junta universal. Cada junta tem seu próprio grau de liberdade. As juntas giratórias, helicoidais e prismáticas têm 1 DoF, as juntas cilíndricas e universais têm 2 DoF e as juntas esféricas têm 3 DoF. Quando o grau de liberdade é determinado para uma junta, geralmente se refere ao número de eixos que a junta oferece movimento aos elos anexados.
Quando múltiplas juntas são conectadas para formar um braço robótico ou robô industrial, o grau de liberdade resultante é diferente. No contexto de um robô, o grau de liberdade é o número de variáveis ou parâmetros independentes que definem o movimento ou configuração do robô. DoF representa o número de maneiras pelas quais um robô pode se mover ou se posicionar em seu espaço de trabalho. Quanto maior o grau de liberdade, mais flexível e adaptável é o robô. Um robô com alto DoF pode realizar movimentos mais complexos e realizar uma variedade de tarefas. Um DoF mais alto, no entanto, acarreta mais custos, complexidade e desafios de controle.
Como calcular o grau de liberdade de um robô?
Determinar o grau de liberdade de um robô pode não ser tão fácil. Para certos tipos de robôs, é bastante simples. Por exemplo, um robô cartesiano é sempre 3-DoF. Um robô escalar é 4-DoF. Embora para outros tipos de robôs e designs de robôs, não seja tão simples. Se cada junta do robô for independente e não tiver restrições e dependências, o DoF total do robô será a soma do DoF de todas as juntas. Por exemplo, se um robô possui duas juntas de revolução e duas juntas prismáticas, todas independentes sem quaisquer dependências, o DoF total do robô é 4 (2 + 2), com cada junta adicionando um grau de liberdade. Geralmente, as juntas não são todas independentes e têm algumas restrições aplicadas a elas. As dependências das juntas complicam ainda mais a equação.
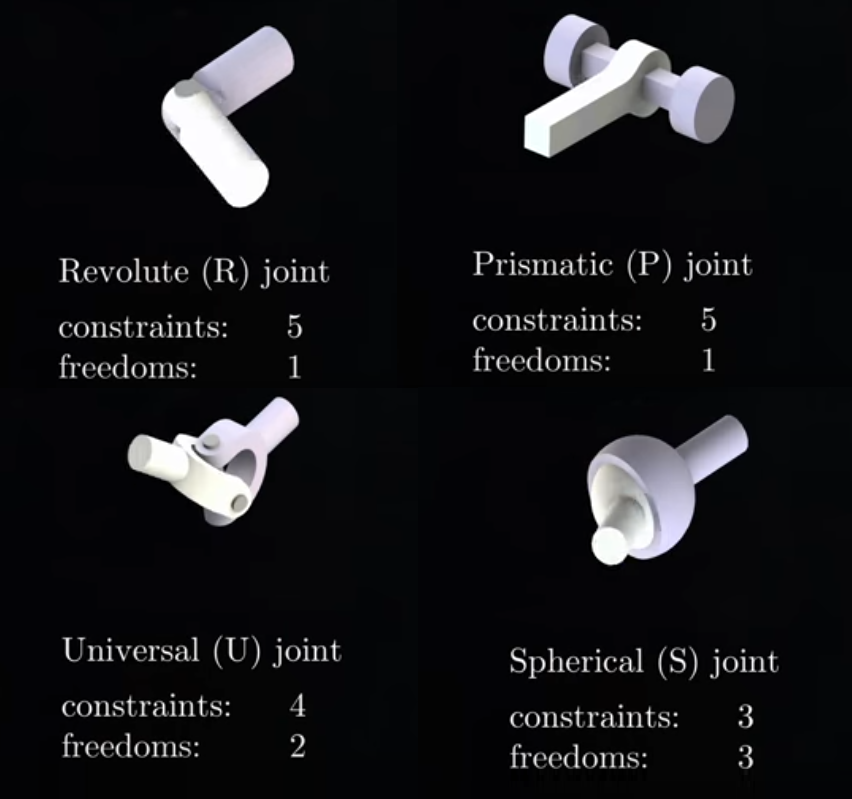
Figura 1.
Cada tipo de junta possui um certo número de restrições independentes. Por exemplo, o número de restrições independentes entre dois corpos rígidos planares para juntas de revolução e prismáticas é 2. O número de restrições independentes entre dois corpos rígidos espaciais para juntas de revolução e prismáticas é 5. O número de restrições independentes entre dois corpos rígidos espaciais para juntas helicoidais, cilíndricas, universais e esféricas é 5, 4, 4 e 3, respectivamente. O grau de liberdade de uma articulação específica é a diferença entre o número de restrições independentes e a soma das liberdades dos corpos. Por esse cálculo, as juntas giratórias, helicoidais e prismáticas têm 1 DoF, as juntas cilíndricas e universais têm 2 DoF e as juntas esféricas têm 3 DoF.
O grau de liberdade das juntas independentes é resumido em tabela 1.
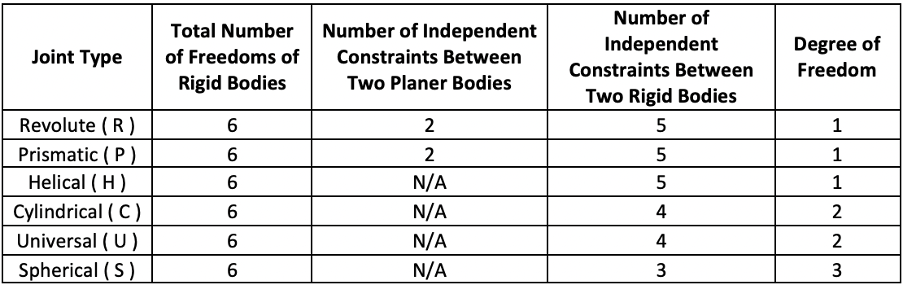
Tabela 1.
Como cada robô possui um mecanismo diferente, o cálculo do grau de liberdade pode ser diferente. Uma forma comum de determinar o grau de liberdade de um robô é o critério de Kutzbach e o critério de Chebychev-Grubler, conhecido como Fórmula de Grubler. O critério de Kutzbach aplica-se apenas ao grau de liberdade de mobilidade de um mecanismo plano. De acordo com o critério de Kutzbach, para que um mecanismo planar ou espacial seja móvel, ou seja, tenha um grau de liberdade superior a 0, o número de equações de restrição (C) deve ser maior ou igual à diferença no número de links (L) do número de parâmetros cinemáticos independentes (P).
C >= PL para qualquer mecanismo planar ou espacial ser móvel.
De acordo com o critério Chebychev-Grubler, o grau de liberdade do mecanismo é dado pela seguinte equação (Equação 1).
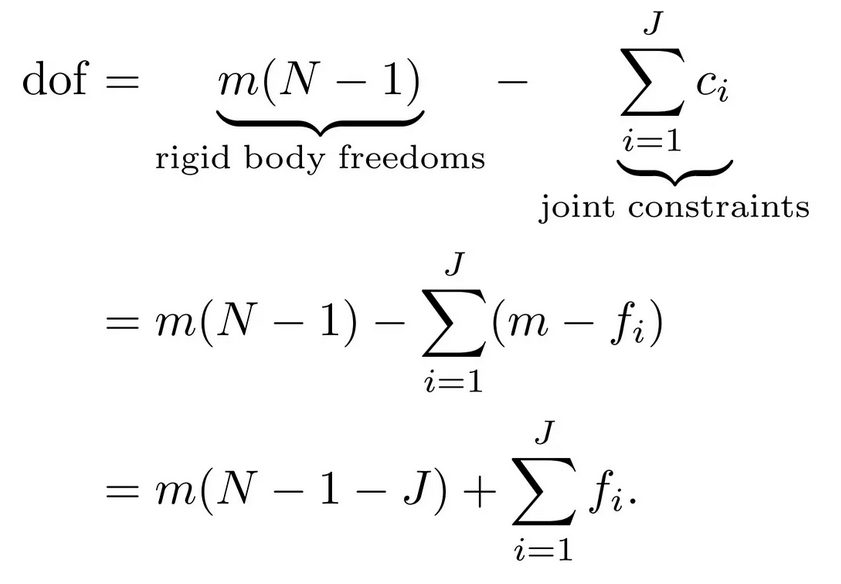
Equação 1.
Onde:
m = graus de liberdade de um único corpo/elo, que é igual a 3 para um corpo rígido movendo-se em um plano e é igual a 6 para um corpo rígido movendo-se no espaço tridimensional.
N = Número de links/corpos incluindo terra
J = Número de juntas
Ci = Número de restrições fornecidas pela junta i
fi = Número de liberdades proporcionadas pela articulação i
Ao aplicar o critério Chebychev-Grubler a um mecanismo planar, a equação para DoF é:
DoF = 3(L-1) – 2J – H
Onde:
L = Número de links
J = Número de juntas binárias
H = Número de pares mais altos
Apliquemos o critério de Chebychev-Grubler a alguns mecanismos planares que não possuem pares superiores para calcular o grau de liberdade.
Para um mecanismo de três barras de cadeia fechada, como mostrado na Figura 2.
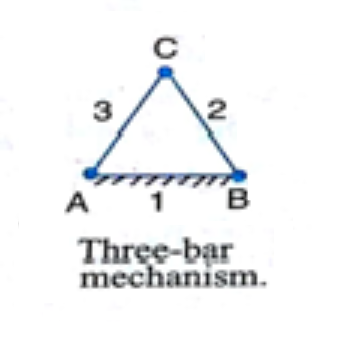
Figura 2.
DoF = 3(3-1)-2×3 = 0
Para um mecanismo de quatro barras de corrente fechada, como mostrado na Figura 3.
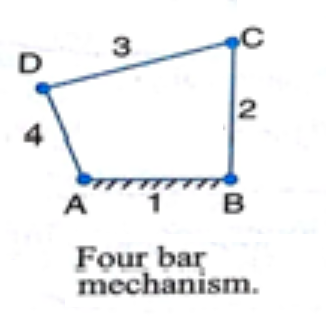
Figura 3.
DoF = 3(4-1)-2(4) = 1
Para um mecanismo de cinco barras em cadeia fechada, como mostrado na Figura 4.
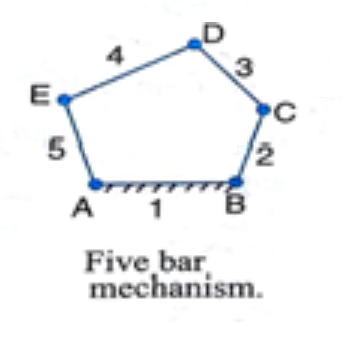
Figura 4.
DoF = 3(5-1)-2(5) = 2
Para um mecanismo de corrente fechada de cinco barras com duas juntas ternárias, como mostrado na Figura 5.
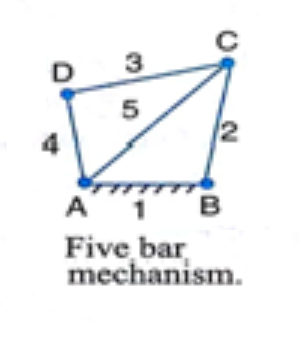
Figura 5.
DoF = 3(5-1)-2(6) = 0
Para um mecanismo de seis barras de corrente fechada com quatro juntas ternárias, como mostrado na Figura 6.
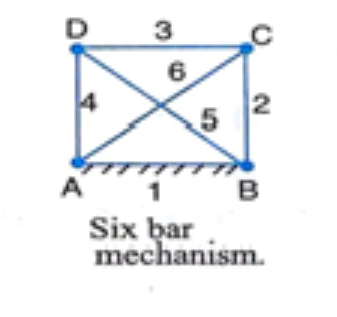
Figura 6.
DoF = 3(6-1) – 2(8) = -1
A Fórmula de Grubler pode ser aplicada apenas aos mecanismos que possuem juntas de 1 DoF, ou seja, as juntas que formam o sistema robótico são de revolução, prismáticas ou helicoidais. Não se aplica a mecanismos com juntas 2-DoF ou 3-DoF. A fórmula também pode ser aplicada a mecanismos de cadeia aberta. Por exemplo, um mecanismo de cadeia aberta com 3 juntas de revolução e uma junta prismática é mostrado em Figura 7.
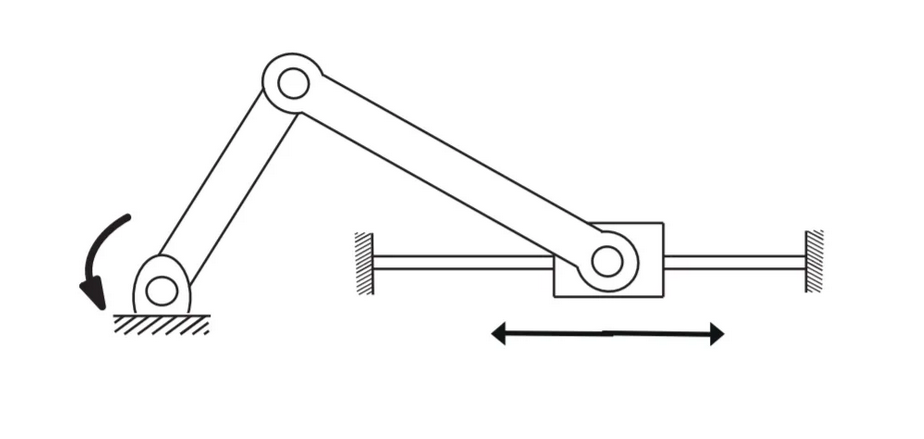
Figura 7. Mecanismo de corrente aberta com 3 juntas de revolução e uma junta prismática.
Existem quatro elos/corpos conectados por quatro juntas, cada junta tendo 1-DoF, então pela Fórmula de Grubler
DoF = 3 (4-1-4) + (1+1+1+1) = 1
A Fórmula de Grubler não é aplicável quando as juntas não são independentes. Por exemplo, considere o seguinte mecanismo.
Ao aplicar a equação de Grubler ao mecanismo acima (Figura 8), obtemos um DoF de 0.
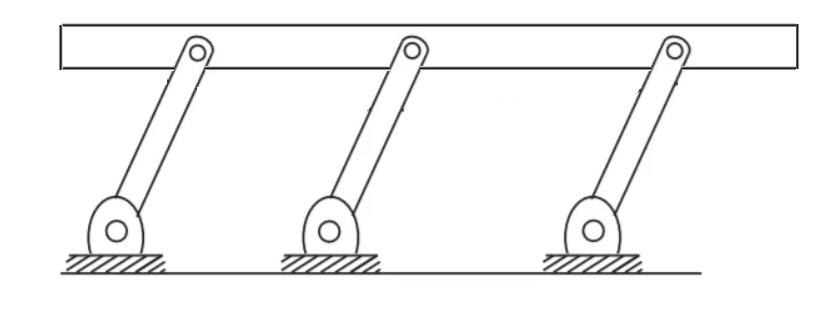
Figura 8. Mecanismo de cadeia aberta com 3 juntas de revolução e uma junta prismática com a equação de Grubler aplicada.
DoF = 3 (3-1-3) + (1+1+1) = 0
Mas pode-se ver claramente que o mecanismo acima tem um grau de liberdade igual a 1. Como a junta intermediária no mecanismo acima não é independente, a Fórmula de Grubler não se aplica a ela.
Encontrar o grau de liberdade para projetos de robôs simples é fácil, pois há mais juntas não independentes e mais dependências, a determinação do grau de liberdade de um robô móvel torna-se cada vez mais complexa.
Para simplificar, podemos reduzir a maioria dos projetos mecânicos robóticos em mecanismos de cadeia aberta e de cadeia fechada, como mostrado em Figura 9.
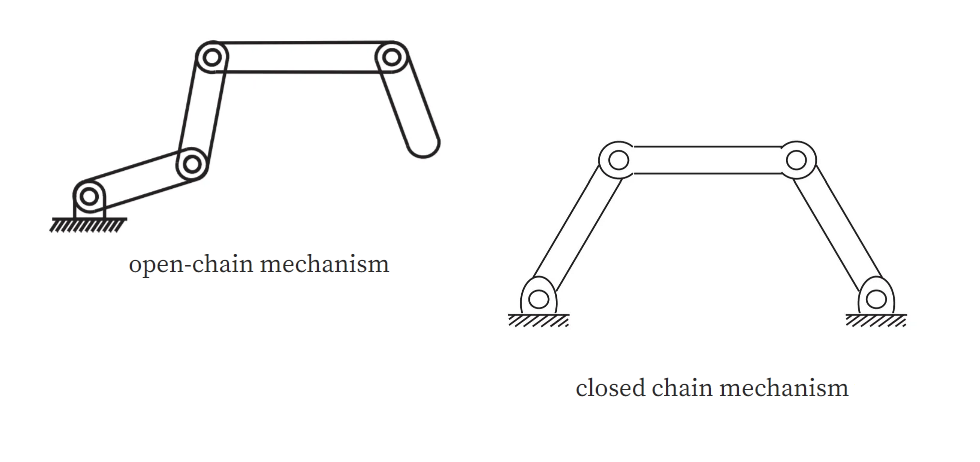
Figura 9.
Desde que o robô tenha apenas juntas 1-DoF, como juntas de revolução, prismáticas e helicoidais, o grau de liberdade do robô pode ser facilmente calculado usando a Fórmula de Grubler. Como o robô envolve juntas não independentes, dependências e juntas 2-DoF e 3-DoF, os cálculos ficam mais complicados.
Por que o DoF é importante?
Cada robô possui uma estrutura mecânica diferente. Com os mesmos links, um robô pode ser organizado usando diferentes juntas e de muitas maneiras. O grau de liberdade de um robô impacta muitas áreas e desempenha um papel fundamental na definição do desempenho do robô. Primeiro, o DoF determina a amplitude e a complexidade dos movimentos que um robô pode realizar. É um fator chave para decidir como os robôs navegarão e manipularão objetos em diferentes configurações e ambientes de trabalho. Um robô DoF mais alto pode acessar e manipular objetos de muitos ângulos e orientações diferentes, permitindo-lhe realizar tarefas mais complexas.
Em segundo lugar, o DoF é uma consideração importante na determinação da adaptabilidade do robô às tarefas. Tarefas diferentes exigem diferentes amplitudes de movimento, ângulos de abordagem e orientações. Tarefas mais simples podem ser realizadas por tarefas com DoF mais baixo, enquanto tarefas mais complexas requerem DoF mais alto. Além disso, o grau de liberdade de um robô é novamente um fator importante na determinação do espaço de trabalho do robô. Um robô com DoF mais alto não só possui um espaço de trabalho maior, mas também pode utilizar o espaço de trabalho disponível de forma mais eficiente. Portanto, o grau de liberdade é importante para determinar o espaço de trabalho acessível e a acessibilidade aos objetos no espaço de trabalho acessível.
O grau de liberdade também determina a redundância cinemática e a resolução de redundância do robô. O grau de liberdade de um robô projetado para uma tarefa pretendida não deve ser superior ao necessário. Mesmo DoF desnecessariamente alto pode representar obstáculos no movimento de um robô, torná-lo menos eficiente em termos energéticos e prejudicar a sua estabilidade. O grau de liberdade deve ser suficiente para aumentar a redundância cinemática do robô, de modo que o robô possa repetir efetivamente os movimentos de maneira otimizada em termos de energia, mantendo boa estabilidade e repetibilidade. O design do robô deve ser otimizado para que seu movimento e postura correspondam a objetivos específicos.
O grau de liberdade de um robô também afeta o controle e o planejamento do robô. À medida que o grau de liberdade de um robô aumenta, algoritmos e técnicas de controle mais complexos são necessários para planejar, coordenar e controlar eficazmente múltiplos graus de liberdade. O planejamento e controle de um robô com múltiplos graus de liberdade envolve enfrentar desafios como planejamento de trajetória, geração de trajetória, prevenção de colisões e coordenação conjunta.
Conseqüentemente, o grau de liberdade de um robô desempenha um papel importante na definição de seu alcance e alcance, adaptabilidade, repetibilidade, estabilidade, desempenho, complexidade e eficiência.