
1. Modo de controle de pulso do servo motor
Em alguns pequenos equipamentos autônomos, a seleção do controle de pulso para realizar o posicionamento do motor deve ser o modo de aplicação mais comum.
Este modo de controle é simples e fácil de entender.
Ideia básica de controle: a quantidade total de pulso determina o deslocamento do motor e a frequência do pulso determina a velocidade do motor.
O pulso é selecionado para realizar o controle do servo motor.
Abra o manual do servo motor e terá a seguinte tabela:
| Formulário de pulso de comando | Nome do sinal | Comando de direção positiva | Comando de direção negativa |
| Diferença de fase de 90 bits
Pulso bifásico fase A + B |
SINAL DE PULSO |
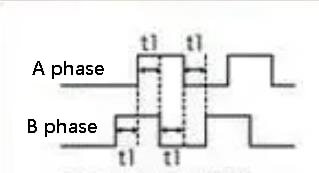
B é 90 graus mais rápido que a fase a |
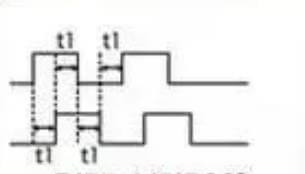
B é 90 graus mais lento que a fase a |
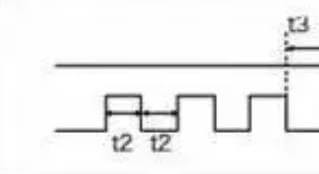
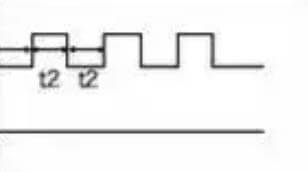
| Trem de pulso positivo + trem de pulso negativo | SINAL DE PULSO |
|
|
| Pulso + símbolo | SINAL DE PULSO |
|
|
Ambos são controlados por pulso, mas o método de implementação é diferente:
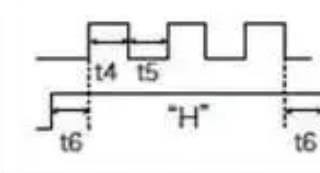
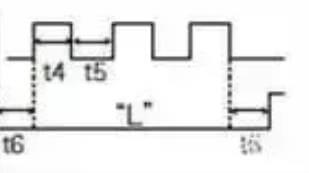
Primeiro, o driver recebe dois (a, b) pulsos de alta velocidade e determina o sentido de rotação do motor através da diferença de fase dos dois pulsos.
Conforme mostrado na figura acima, se B for 90 graus mais rápido que a fase a, é rotação positiva; Se B for 90 graus mais lento que a fase a, ela será revertida.
Durante a operação, os pulsos bifásicos deste controle ficam alternados, por isso também chamamos esse método de controle de controle diferencial.
Possui características diferenciais, o que também mostra que este modo de controle possui maior capacidade anti-interferência.
Em alguns cenários de aplicação com forte interferência, este modo é preferido.
Porém, desta forma, o eixo do motor precisa ocupar duas portas de pulso de alta velocidade, o que não é aplicável à tensão da porta de pulso de alta velocidade.
Em segundo lugar, o driver ainda recebe dois pulsos de alta velocidade, mas os dois pulsos de alta velocidade não existem ao mesmo tempo.
Quando um pulso está no estado de saída, o outro deve estar no estado inválido.
Ao selecionar este modo de controle, devemos garantir que haja apenas uma saída de pulso ao mesmo tempo.
Dois pulsos, um de saída na direção positiva e outro na direção negativa.
Como no caso acima, este modo também é um eixo do motor, que precisa ocupar duas portas de pulso de alta velocidade.
Terceiro, apenas um sinal de pulso precisa ser dado ao driver, e a operação direta e reversa do motor é determinada pelo sinal IO unidirecional.
Este método de controle é mais simples de controlar e a ocupação de recursos da porta de pulso de alta velocidade é mínima.
Em geral, sistemas pequenos, este método pode ser preferido.
2. Modo de controle analógico do servo motor
No cenário de aplicação onde o servo motor precisa ser usado para realizar o controle de velocidade, podemos selecionar a quantidade analógica para controlar a velocidade do motor.
O valor da grandeza analógica determina a velocidade de funcionamento do motor.
A grandeza analógica pode ser selecionada de duas maneiras: corrente ou tensão.
Modo de tensão:
Você só precisa adicionar uma certa tensão ao final do sinal de controle.
Em alguns cenários, você pode até usar um potenciômetro para realizar o controle, o que é muito simples.
Porém, quando a tensão é selecionada como sinal de controle, em ambientes complexos, a tensão é facilmente perturbada, resultando em controle instável.
Modo atual:
É necessário um módulo de saída de corrente correspondente, mas o sinal de corrente tem forte capacidade anti-interferência e pode ser usado em cenas complexas.
3. Modo de controle de comunicação do servo motor
As formas comuns de realizar o controle do servo motor por comunicação incluem can, EtherCAT, MODBUS e PROFIBUS.
Usar a comunicação para controlar o motor é o método de controle preferido em alguns cenários de aplicação de sistemas complexos e em grande escala.
Desta forma, o tamanho do sistema e o número de eixos do motor são fáceis de cortar e não há fiação de controle complexa. O sistema construído possui alta flexibilidade.
4. Expansão
1. Controle de torque do servo motor
O modo de controle de torque serve para definir o torque de saída externo do eixo do motor por meio da entrada de grandeza analógica externa ou atribuição direta de endereço.
Por exemplo, se 10V corresponde a 5nm, quando a grandeza analógica externa é definida para 5V, a saída do eixo do motor é 2,5nm.
Se a carga do eixo do motor for inferior a 2,5 nm, o motor gira para frente, o motor não gira quando a carga externa for igual a 2,5 nm e o motor reverte quando for maior que 2,5 nm (geralmente sob carga de gravidade).
O torque definido pode ser alterado alterando a configuração da grandeza analógica em tempo real ou alterando o valor do endereço correspondente através de comunicação.
É usado principalmente em dispositivos de enrolamento e desenrolamento que possuem requisitos rígidos quanto à tensão dos materiais, como dispositivos de enrolamento ou equipamentos de tração de fibra óptica.
A configuração do torque deve ser alterada a qualquer momento de acordo com a mudança do raio do enrolamento, de modo a garantir que a tensão dos materiais não mudará com a mudança do raio do enrolamento.
2. Controle de posição do servo motor
No modo de controle de posição, a velocidade de rotação é geralmente determinada pela frequência dos pulsos de entrada externos e o ângulo de rotação é determinado pelo número de pulsos.
Alguns servos podem atribuir valores à velocidade e ao deslocamento diretamente através da comunicação.
Como o modo de posição pode controlar estritamente a velocidade e a posição, ele geralmente é usado em dispositivos de posicionamento, máquinas-ferramentas CNC, máquinas de impressão e assim por diante.
3. Modo de velocidade do servo motor
A velocidade de rotação pode ser controlada através da entrada de grandeza analógica ou frequência de pulso.
Quando há controle PID de malha externa do dispositivo de controle superior, o modo de velocidade também pode ser posicionado, mas o sinal de posição do motor ou o sinal de posição da carga direta deve ser retornado ao computador superior para operação.
O modo de posição também suporta o anel externo de carga direta para detectar o sinal de posição.
Neste momento, o codificador na extremidade do eixo do motor detecta apenas a velocidade do motor e o sinal de posição é fornecido pelo dispositivo de detecção direta na extremidade da carga final.
Isto tem a vantagem de poder reduzir o erro no processo de transmissão intermediário e aumentar a precisão de posicionamento de todo o sistema.
4. Sobre os terceiros loops
O servo é geralmente controlado por três loops. Os chamados três circuitos são três sistemas de regulação PID de feedback negativo de circuito fechado.
O loop PID mais interno é o loop atualque é totalmente realizado dentro do servo driver.
A corrente de saída de cada fase do driver para o motor é detectada através do dispositivo Hall, e o feedback negativo é ajustado para a corrente para ajuste do PID, de modo que a corrente de saída fique o mais próxima possível da corrente definida.
A malha de corrente controla o torque do motor, portanto o cálculo do driver é o menor no modo de torque e tem a resposta dinâmica mais rápida.
O segundo loop é o loop de velocidade.
O ajuste do PID de realimentação negativa é realizado através do sinal detectado no encoder do motor.
Sua saída PID no loop é diretamente o ajuste do loop de corrente. Portanto, o controle da malha de velocidade inclui a malha de velocidade e a malha de corrente.
Em outras palavras, o loop de corrente deve ser usado para qualquer modo, e o loop de corrente é a base do controle.
Ao mesmo tempo que controla a velocidade e a posição, o sistema controla a corrente (torque) para obter o controle correspondente da velocidade e da posição.
O terceiro loop é o loop de posição, que é o loop mais externo.
Pode ser construído entre o driver e o encoder do motor, ou entre o controlador externo e o encoder do motor ou a carga final, dependendo da situação real.
Como a saída interna da malha de controle de posição é o ajuste da malha de velocidade, o sistema executa a operação de todas as três malhas no modo de controle de posição.
Neste momento, o sistema tem a maior quantidade de operação e a velocidade de resposta dinâmica mais lenta.







